We are a student competition team from the University of Applied Science and Arts Northwestern Switzerland (FHNW). Our goal is to compete at the European Rover Challenge (ERC). The ERC is an international student competition held yearly in Poland. It’s goal is to further advance science and space discovery while preparing students for the industry. The Challenge is divided into few tasks, for example navigation or manipulating. In the last year, we designed and built a rover thoroughly, to master all those tasks. You can find more information on our Blog.
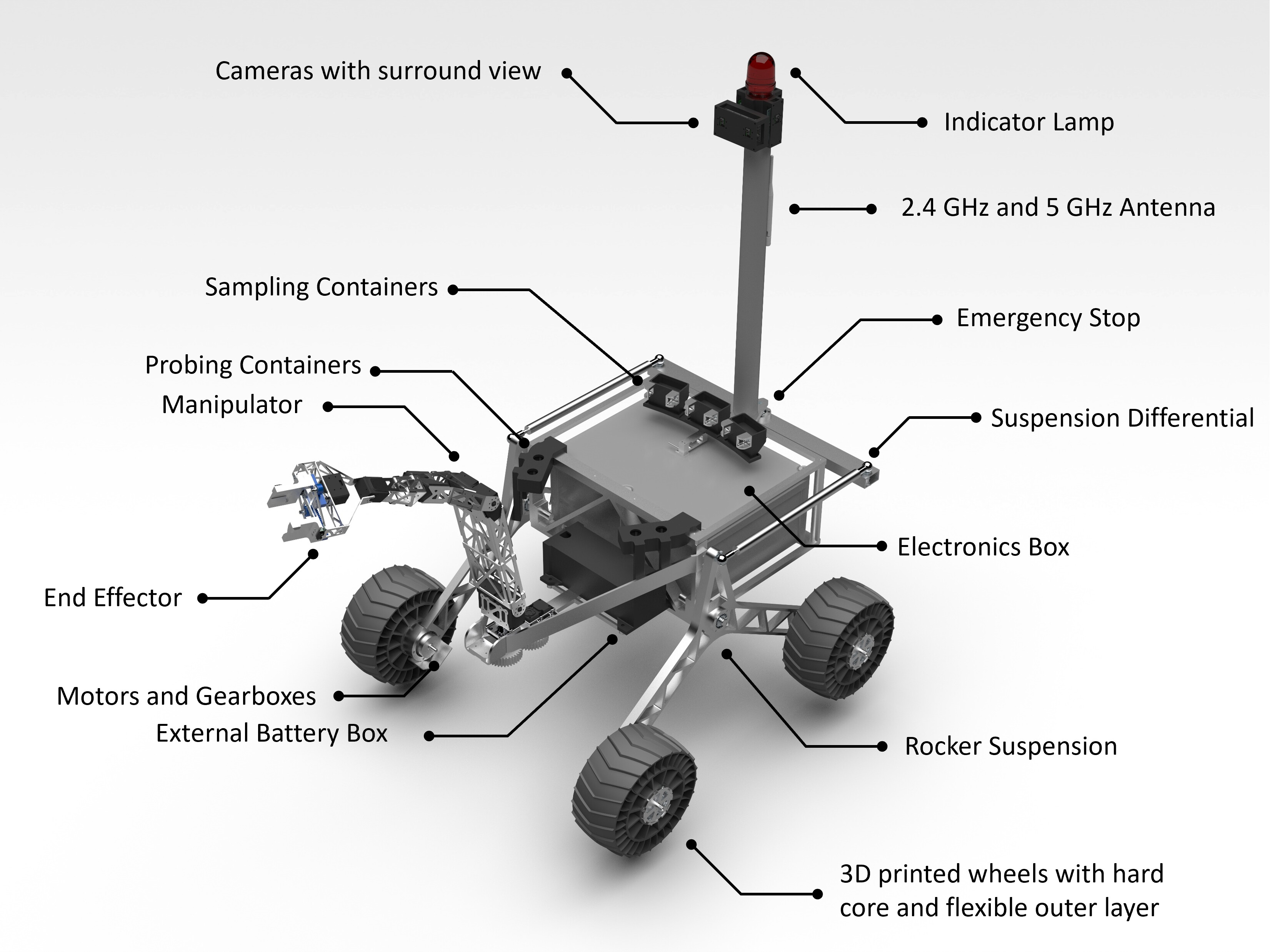
During ERC, our rover Meyer 1 faces multiple challenges. For example, different plugs need to be inserted into a panel and buttons need to be pressed. Furthermore, samples and probes need to be taken. For all these tasks, a complex manipulator that is strong is needed.
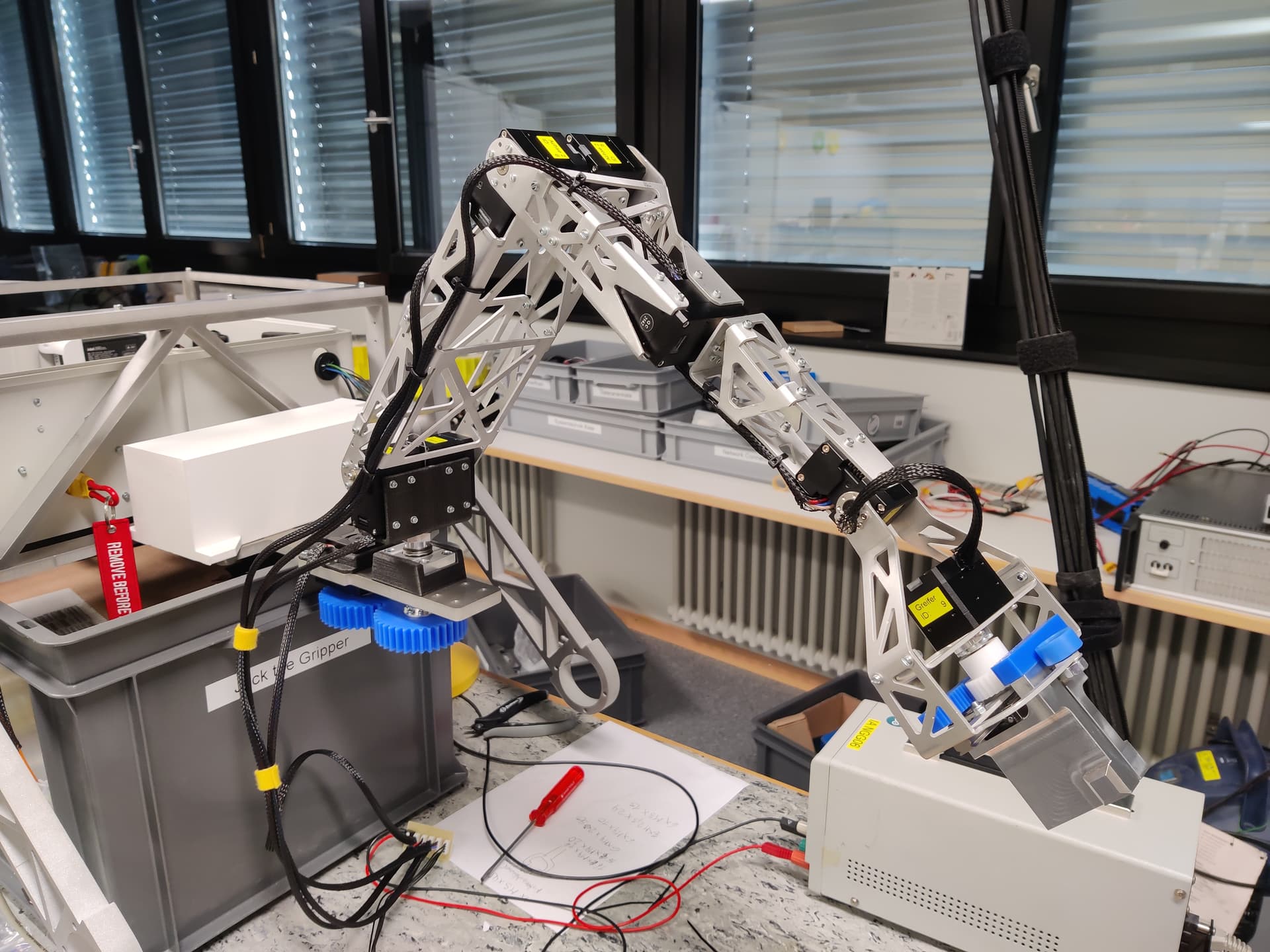
The solution: A framework structure coupled with intelligent servo motors by our sponsor Robotis. The framework structure made from waterjet cut aluminum is an optimal lightweight solution and ensures the arm, which is about 70 cm. long, weighs in under 3 Kg. The robotis servo motors themselves also serve as bearings, as the axial and radial loads are not too large. This makes our job quite a bit easier and makes putting everything together a bit like playing with Lego. Below you can see our manipulator.
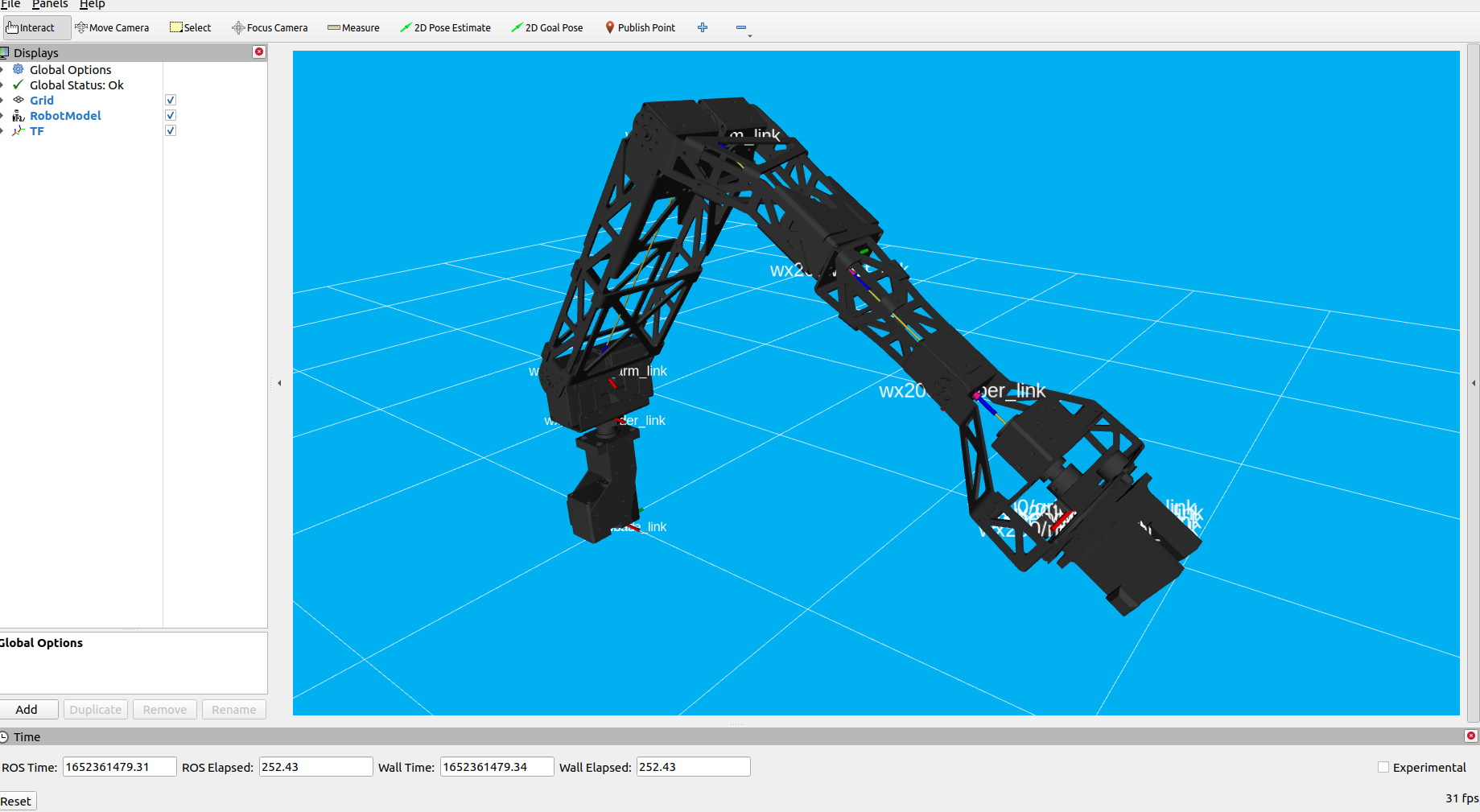
To control the arm, we have a digital model of our manipulator that can be viewed on a computer screen. A software uses input from a PS4 controller to convert inputs into motions for the different axes. This motion is then added to the simulated model and the actual manipulator at the same time. Through the smart servos that we control via RS-485, the software always knows where exactly an axis is, how much current/torque it uses and if the desired position could be reached. Below, you can see the simulated replica of the manipulator seen above.