The reason I asked about the definitions of dxl and dxl3 is that my approach for mixed protocols (when using “Dynamixel2Arduino” library) had been to use only 1 dxl object pointing to only 1 physical serial port (Serial3 in this case), and then to change/switch the protocol (1.0 or 2.0) just before sending some kind of command to a specific DXL. Please see this post.
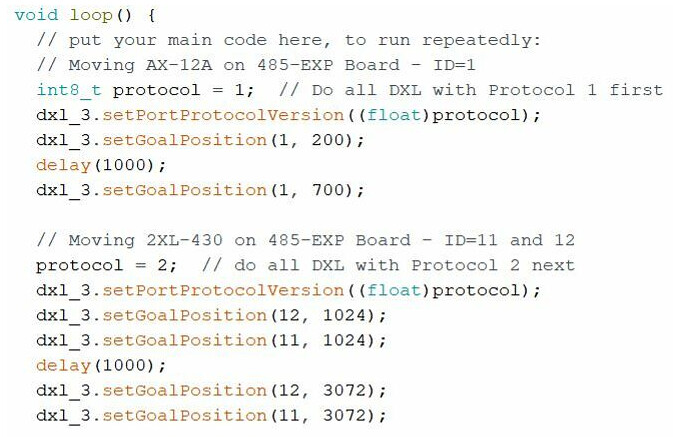
With your approach, it seemed that you associated “statically” 2 DXL objects (with different protocols) to the same physical Serial3 port (?), I am just guessing as you did not provide a direct answer to my previous comment. With your approach, the convenience is that you did not have to flip-flop “protocols” like in my approach. But I do not know for sure which way the ROBOTIS programmers want us to use their library. So let me also try your approach on my system for AX-12A and 2XL430 (using RC-100 Buttons) to see if there is any difference between the 2 approaches, then we both can learn possibly something new ![]() .
.