Hi all, I have a dynamixel MX64AT based on Prtocol 2.0 and powered by 12V.
I have some questions about performances:
-
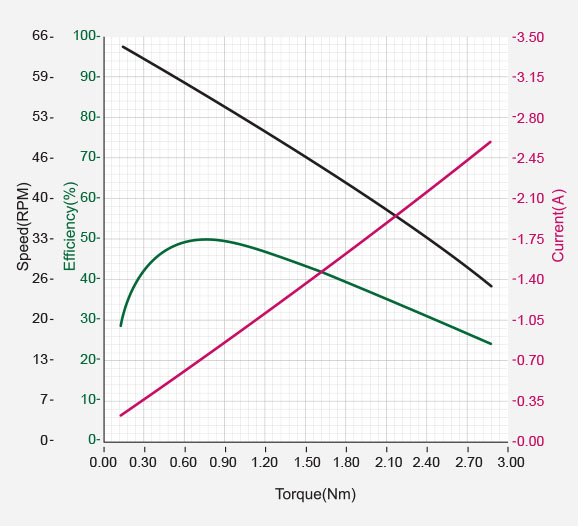
from the graph https://emanual.robotis.com/assets/images/dxl/mx/mx-64_ntgraph.jpg
it seems that a speed of 0 is made by a current of 4.1A and I have some confusion because of the unit, in the graph’s image is 4.1mA and in the specifications DYNAMIXEL MX-64AT - ROBOTIS is 4.1A. Looking then in wizard 2.0, if I set 1941 the conversion becomes 4100mA. Is the graph’s scale wrong? -
What is the relation between the raw unit and the milli_ampere unit of the current looking at this https://emanual.robotis.com/docs/en/popup/arduino_api/setGoalCurrent/?
-
I m interested to understand better the topic of the torque-stall torque controlling also the performance graph. In my case I would like to swing an rectangular objects as pendulum
and I would like to understand if the dynamixel is able to drive a pendulum of a certain weight (for example 1kg it’s not important) and 1 m of length for example. I noticed this interesting page Torque Ratings - ROBOTIS where there are some formula but not so practical. Indeed, how can I get also an hypotesys of efficiency in terms of working time duration?
A little example in poor words, if I set 2800 mA (from the first graph) I shall have 3Nm of torque and 70% of efficiency. How is the maximum load that the dynamixel can swings and for how long time? -
How a variable resistance could interfere with that above?
{kind=link}
Surely your comments and tips could help me to make it clearer, thank you.