Humanoid_Team_Humboldt_Team_Description_2006.pdf (5.8 MB)
Abstract
This document describes the current hardware and software
of the robot system developed by the Humanoid Team Humboldt for the
RoboCup competitions to be held in Bremen 2006. The robots are based
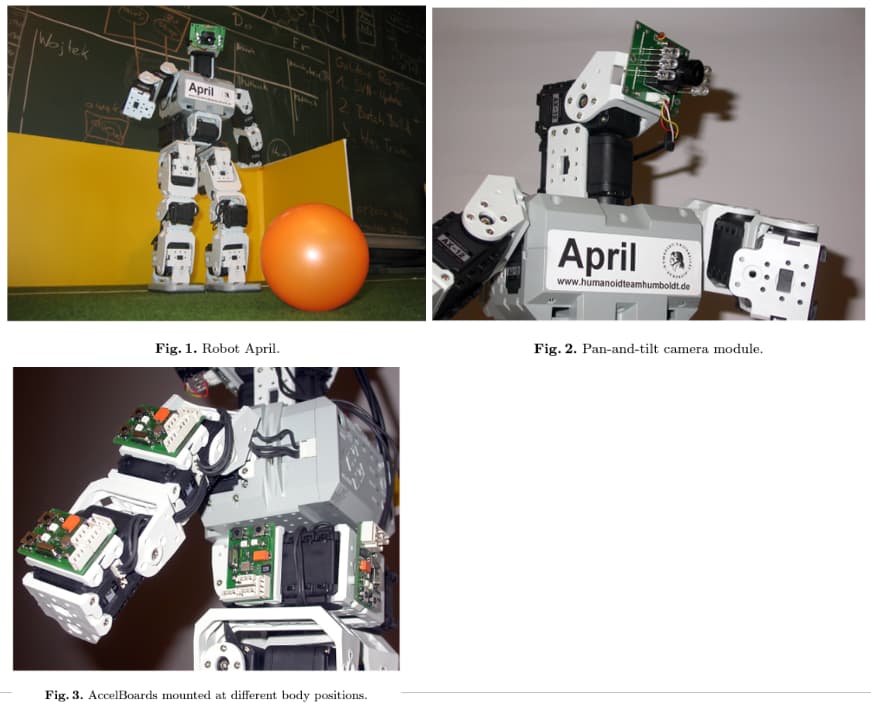
on a construction kit, which has been significantly extended to serve as a
platform for research and competition. The construction kit is enriched
by sensors like cameras and acceleration sensors. The existent processing
power is expanded by a PDA as well as microprocessors that can be
distributed over the body. The paper also explores the developed control
software, including the perceptional, modeling, behavioral, and motion
controlling components. Mechanical, electrical, and software design are
discussed.
This academic publication features our DYNAMIXEL AX-12 all-in-one smart actuators
All credit goes to Manfred Hild, Matthias Jungel, and Michael Spranger from Institut f¨ur Informatik, LFG K¨unstliche Intelligenz, Humboldt-Universit¨at zu Berlin,