@nicolaskk
Is your controller a PC with USB ports? And you have only 1 U2D2 to use? Also what is the rating of your LiPo battery in terms of C number or mAh rating? And the SMPS2Dynamixel has only 2 3P connectors, how many SMPS2Dynamixel modules are you using? SIX of them? Lastly, does the physical configuration of your robot use 4 groups of 3 XL-430s or 3 groups of 4 XL-430s?
Besides the Power issue, you may also have to take into account the Control issue: what is the physical distance between the U2D2 and your “farthest” servo away from the U2D2?
Please see this post also:
################
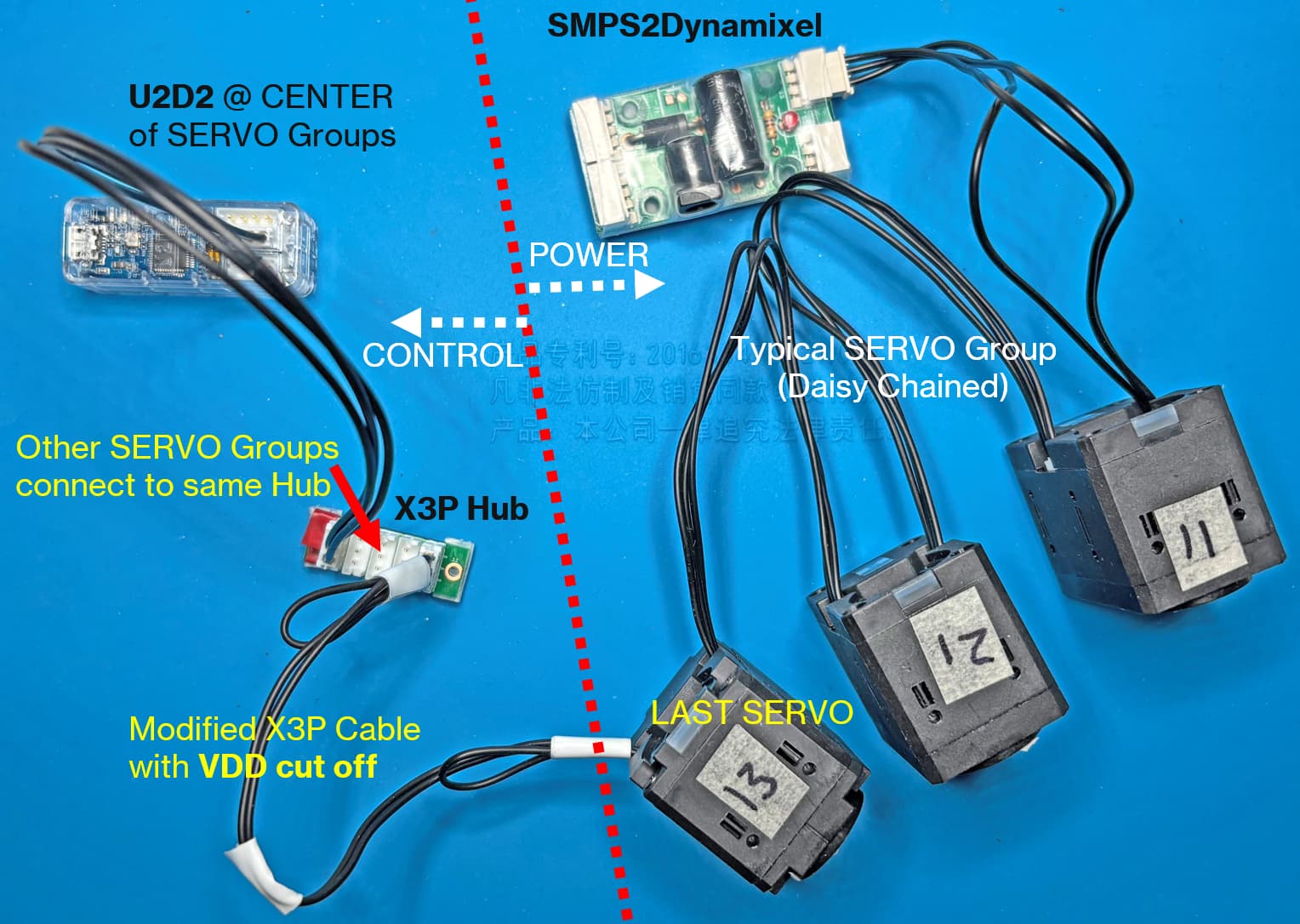
Assuming that your robot is composed of 4 groups of 3 XL-430s each, then I am suggesting the following configuration:
You probably already have all the hardware needed, except for the X3P Hub. This item is hard to purchase nowadays. But the X4P Hub is available now at ROBOTIS USA Shop.
And you can plug X3P cables into an X4P Hub, just make sure to align up properly the X3P connectors for your own use (basically you do not use the 4th pin of the X4P Hub ![]() )
)
The wiring scheme shown above offers the following features:
- The POWER Circuit for each Servo Group is isolated from the other POWER Circuits of the remaining 3 Servo Groups. But they do share the COMMON GROUND.
- The CONTROL Circuit via U2D2 and the X3P Hub is isolated from ALL Power Circuits. But the U2D2 does share the COMMON GROUND and ALL TTL DATA Lines so that the U2D2 can control all 12 XL-430s “as normal” and “in parallel”. On the physical robot, try to put the U2D2 and X3P Hub at the “physical center” of the 4 Servo Groups as much as possible.
- So all the X3P cables are used “as normal”, except for the X3P cables that connect the X3P Hub to the LAST Servo of each of the 4 Daisy Chains: they need to have their VDD wires CUT OFF.