I’m complete new to servos and don’t know what parts I need to buy.
Could you please help me out?
My task is to turn a servo into about, + 30 to -30 degrees from a computer software using COM-port commands built in Labview. Distance from computer to servo about 2-3 meters (7-10 feet)
The maximum torque I need is about 3,3 Nm.
I also need to monitor the torque from the servo or set a limit (maximum allowed) torque in the servo.
I will try to set the servo position first to +30 degree, but if a certain torque is reached, I will stop at that point.
Then I will do the same for -30 degree.
What servo do I need?
Do I need a servo controler like the OpenCM9 or similar, which shall I buy?
If I need the OpenCM9, is there a firmware where I just from the Com-port specify the position and max torque?
What computer software can I use to download the firmware?
If I must write the firmware myself I prefere Labview, is there any solution supporting Labview?
Thank you for your question, and for joining our page! I can provide some basic information below:
Based on your general description, I would most likely recommend a model of the DYNAMIXEL X-series. That link will take you to a landing page which shows all models, and links to individual product specifications. The majority of these models feature 360° position encoding, so the position range should not be an issue. I would recommend reviewing the specifications of models using those e-Manual pages along with our Selection Guide Chart to compare model specifications. To give you a starting point, I might recommend looking at DYNAMIXEL XM430-W350-R.
Allow me to recommend this Quick Start Guide which details some basic setups of ROBOTIS products for using DYNAMIXEL: DYNAMIXEL Quick Start Guide. If you review this information, the first setup on that page could work for you to control the servo using LabView. (the one titled “DYNAMIXEL Starter Set”)
You can also use the DYNAMIXEL Starter Set with our free servo management software DYNAMIXEL Wizard 2.0 to control your DYNAMIXELs from your computer using a GUI (point-and-click) environment. Depending on your specific application, this might be all you need.
Can you share any information regarding the application the DYNAMIXEL will be used for? I might be able to make a better recommendation of model or control hardware.
I think you can simply use U2D2 + U2D2 PHB (these are included in the DYNAMIXEL Starter Set) to connect PC and DYNAMIXEL as @Jonathon recommended .
What you should consider is the physical connection(TTL or RS-485).
RS-485 provides better noise immunity in longer distance while TTL is good for shorter distance(1 foot, ~30cm)
One more thing to consider is the Stall Torque.
XM430-W350 is a great product to begin with for many cases, but you need a maximum 3.3Nm to operate the lever with a servo so you might want to select a DYNAMIXEL with higher torque.
(Note that the stall torque does not mean the full range of torque you can use)
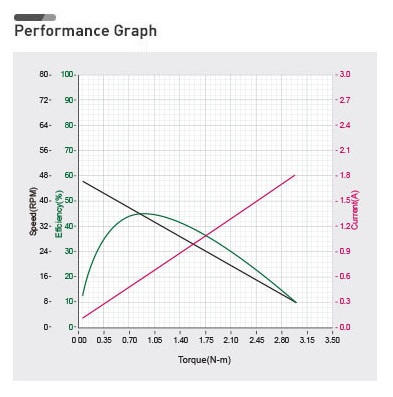
If you take a look at the graph below, the XM430-W350 (Stall Torque : 4.1Nm at 12V input) gradually decreases its RPM as the Torque increases(look at the black solid line in the graph)
Performace graph of XM430-W350
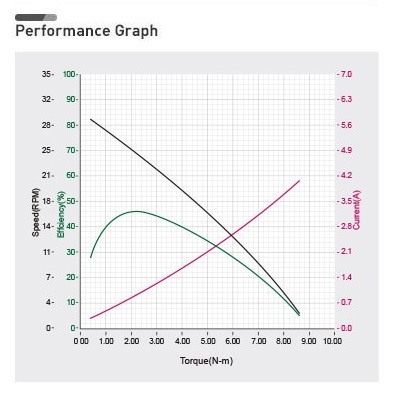
The XM540-W270 below will allow more torque range which will be safe to have.
Do you know any free firmware to use for my purpuse?
I have to be able to specify maximum torque, then tell the servo to go to a specific angle.
If the torque is greater than specified the servo should stop at that point.
Yes, both models support Current based Position control which allows you to set a specific current limit.
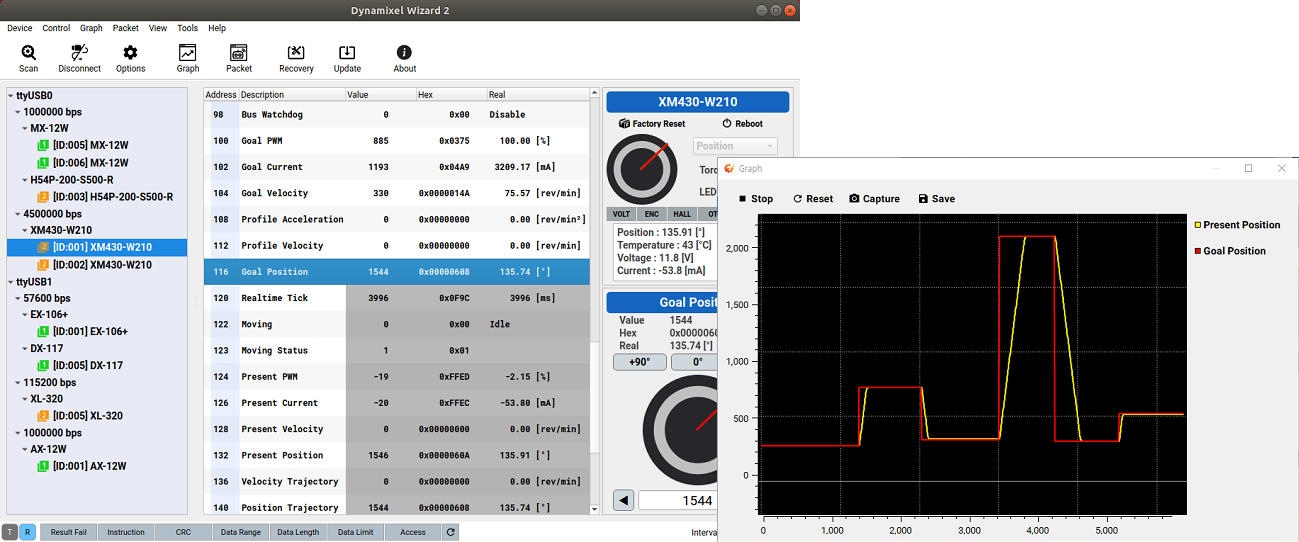
If you install DYNAMIXEL Wizard 2.0 on your PC, you can test various features of DYNAMIXEL easily with GUI environment.
You can also read the Present Current to estimate the applied Torque.
In case of XM540-W270, Present Current value of 520 is about 3.3Nm. (Refer to the graph where 3.3Nm and 1.4A meet on the purple line.
520 * 2.69 [mA](Value-Current conversion constant) = 1400 [mA] = 1.4 [A] is about 3.3Nm.
Please be aware that the Present Current value is a raw data directly read from the current reading sensor of DYNAMIXEL and therefore may fluctuate a bit, so please consider applying some filters to flatten the data.
If I use DYNAMIXEL SDK programming libraries. Can I control the servo direct from a PC (using the U2D2 or U2D2 PHB)? Or do I also download some firmware into the U2D2 or U2D2 PHB.
Hi @peter.svensson, the U2D2 is a simple communication converter to provide communication between the PC and DYNAMIXEL - it does not require any firmware to be downloaded.
The U2D2 PHB (Power Hub Board) is used to provide power to DYNAMIXELs that are connected and has no communication circuits of its own.
For control using DYNAMIXEL SDK from your PC, U2D2 + U2D2 PHB would be recommended. The DYNAMIXEL Starter Set includes both items as well as a 12V 5A AC Adapter for power.