Hi Marcus,
Sorry I know I am probably not the best person to answer this as I don’t have a U2D2 have not used your servos… I have mostly used either AX servos or XL430-W250 servos and have used several different servo controller boards. Mostly for play but also for some Hexapods and have done a quad but never did get it to walk very well (AX servos).
Also hopefully someone from Robotis will give a more complete answer when they get back from vacation.
U2D2 - I assume you would connect this up a USB port on the RPI. I am not sure if you can connect it up to the Hardware Serial port on the RPI4. I believe it mainly connects USB to either DXL (TTL servos) or DXL (RS485 servos) or it has TTL UART connection. But I don’t think it has the ability to connect the 4 pin UART connections to the servos. But again could be wrong.
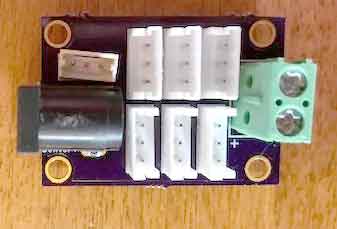
Connecting up to all of the servos, I would run a connection from the U2D2 probably to a HUB. I am not sure if Robotis sells a hub now or not… But one that Trossen now sells:
Has 6 XL like connections as well as an XL320 connection. Originally was setup to be able to XL320 connection from OpenCM9.04 board…
But from a hub like this I would then connect up to each leg. Now depending on real power requirements of these servos, I might use two hubs, and provide separate power to each of the hubs.
My guess is Robotis would maybe recommend some of:
But not sure best way to wire these with only 3 TTL connections. That is one from U2D2, then you need 4 more connections could use one per leg, where you have to daisy chain these to the next one, and then have one connection left for leg?
Power: When I am playing around with the code and other things I usually power my robots from some form of 12v wall wart. Something like: SMPS 12V 5A PS-10 [US-110V] - ROBOTIS Although that one is only 5 amps. I normally use one from Trossen: 12v10a Power Supply
Which is 10 amps.
If I actually want it to walk without cables, will then typically use a 3S Lipo. Which one? I don’t know, it often depends on your needs and space and … Example I think the highest capacity one that Robotis sells is:
But then you are carrying that weight. Also maybe you want more than one battery like, maybe 2. So do you have room for 2 of that size or are you better off with the smaller, cheaper, lighter 1000mah versions?
Also remember that the more weight your robot has to carry, the harder the servos have to work. So sometimes larger heavier multiple batteries could be partially self defeating.
Again sorry hopefully someone will give you a more definitive answer. But hopefully you might get something of this.
Good luck and have fun!