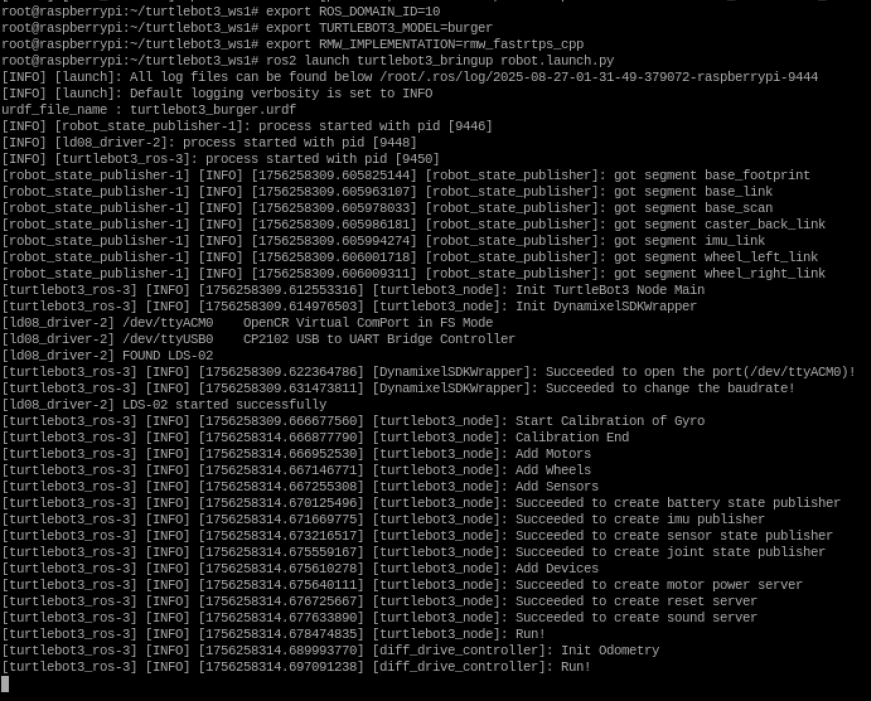
안녕하세요^^ 서빙로봇을 만들고자 opencr 1.0과 라즈베리파이5를 연결하여 다이나믹셀 xl430 모터 4개를 구동하고자 합니다. 아두이노 ide 헤더파일을 수정하여 모터id(1,3)과(2,4)그룹화하여 설정했습니다. 기본 터틀봇3 burger를 bringup 하였을때 run은 되나 teleoperation을 했을시 움직이지 않습니다. 혹시 관련자료나 경험해보신분이 있으시면 조언부탁드리겠습니다