noetic을 쓰다가 새로운 메뉴얼에 있는 humble로 설치를 완료했는데
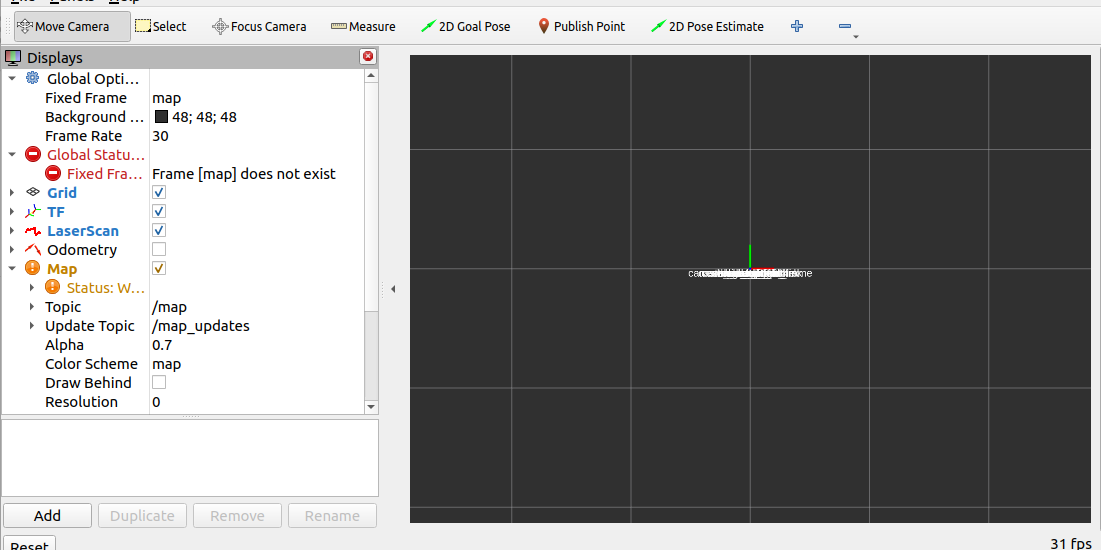
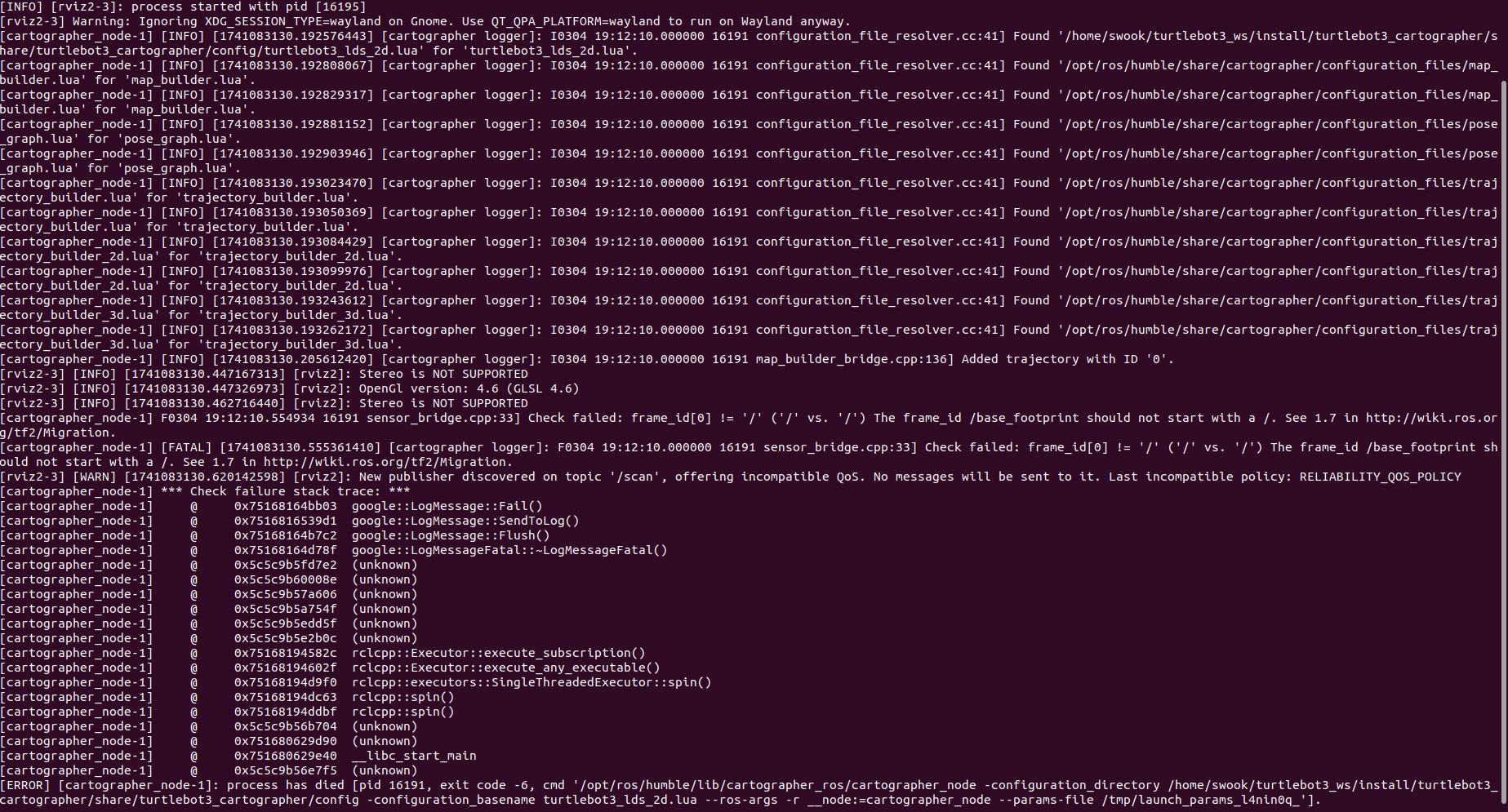
메뉴얼대로 slam을 실행하면 오류가 생깁니다
ros2 launch turtlebot3_cartographer cartographer.launch.py
뒤에 use_sim_time:=True을 붙여도 똑같이 안됩니다
원래 쓰던 ros1이 제대로 안지워서져서 그런건지 아니면 메뉴얼대로 하면 안되는 부분이 있는지 해결방법이 궁금합니다
noetic을 쓰다가 새로운 메뉴얼에 있는 humble로 설치를 완료했는데
메뉴얼대로 slam을 실행하면 오류가 생깁니다
ros2 launch turtlebot3_cartographer cartographer.launch.py
뒤에 use_sim_time:=True을 붙여도 똑같이 안됩니다
원래 쓰던 ros1이 제대로 안지워서져서 그런건지 아니면 메뉴얼대로 하면 안되는 부분이 있는지 해결방법이 궁금합니다
안녕하세요. 해당 오류를 수정했지만 humble 브렌치에 아직 적용이 안되었습니다.
다음을 따라 다시 레포지토리를 받아 다시 시도해 주세요.
먼저, 기존의 TurtleBot3 레포지토리를 삭제하고, 최신 버전(main 브랜치)을 다시 다운로드하세요.
cd ~/turtlebot3_ws/src
rm -rf turtlebot3
git clone -b main https://github.com/ROBOTIS-GIT/turtlebot3.git
이후 아래 명령어를 실행하여 워크스페이스를 정리하고 다시 빌드한 뒤 실행해 보시기 바랍니다.
cd ~/turtlebot3_ws
rm -rf build install log
colcon build --symlink-install
source install/local_setup.bash
다시 Cartographer를 실행하여 문제가 해결되었는지 확인해 주세요.
ros2 launch turtlebot3_cartographer cartographer.launch.py
이 단계를 진행한 후에도 문제가 지속된다면, 오류 로그를 공유해 주세요.