안녕하세요. 터틀봇3 Waffle Pi를 사용하고 있습니다.
Slam을 이용해서 터틀봇 이동을 해보려고 하는데 문제가 발생했습니다.
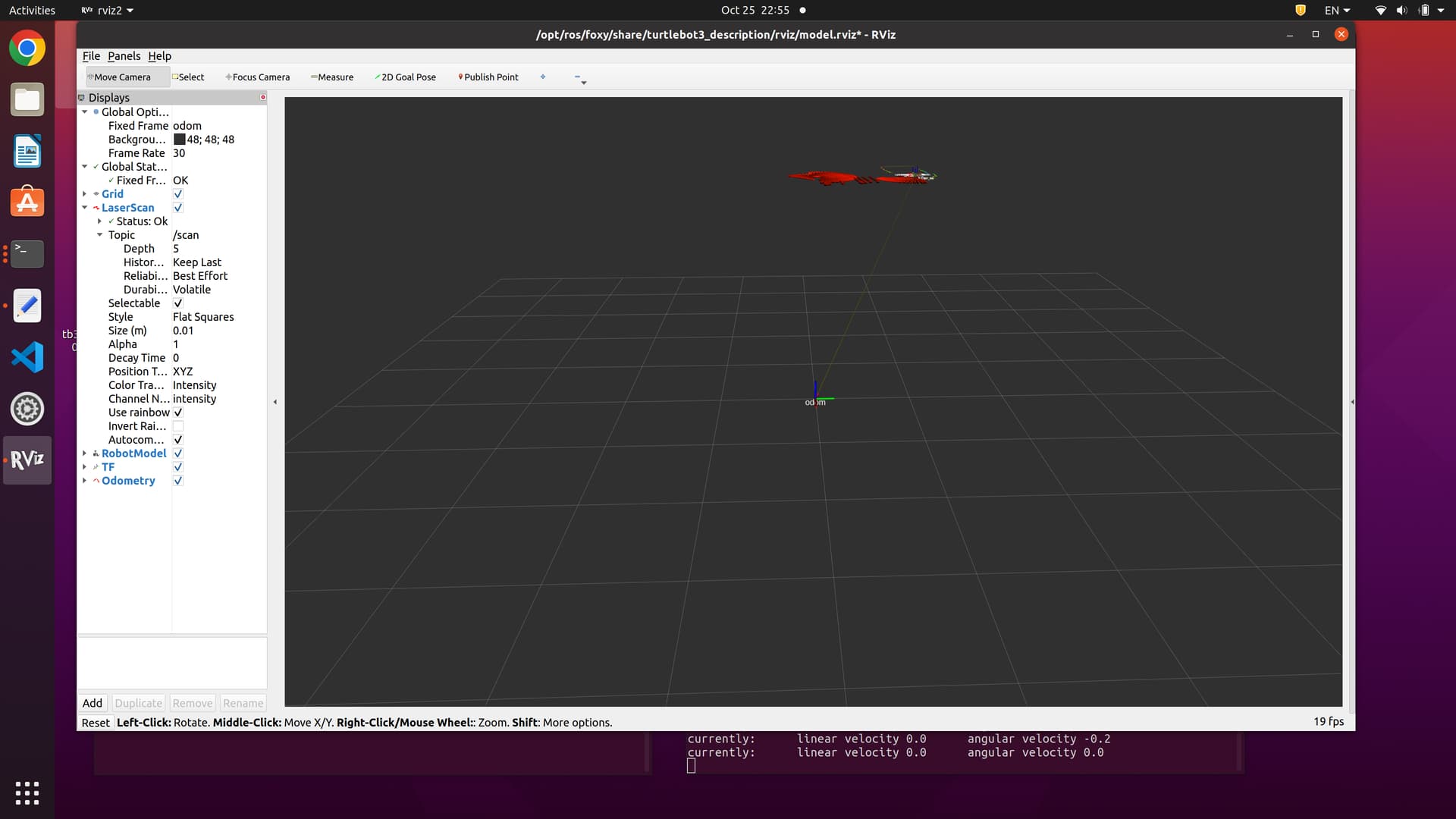
처음에는 Rviz에서 Lidar를 이용해서 주변을 그리는데 조금씩 (빠르게 움직이지 않았습니다.) 움직이다 보면 어느순간 아래 사진처럼 엉뚱한 곳 위치로 이동해져 있습니다.
모델은 터틀봇3 Waffle Pi - LDS-01 모델이며 예전 라즈베리3 모델에서 4로 변경했습니다.
ROS2 설치하고 Foxy 버젼 사용중입니다.
로보티즈 메뉴얼에 있는대로 Foxy 버젼 설치했고 Remote PC는 Ubuntu 20.04 사용중입니다.
RemotePC에서는 ros2 launch turtlebot3_bringup 로 실행했습니다.
SBC에서는 ros2 launch turtlebot3_bringup 로 실행했고
초반에는 정상적으로 보여서 ros2 run turtlebot3_teleop teleop_keyboard 로 조금씩 그리다가 문제가 발생합니다.
어떠한 이유에서 그럴지 감이 안잡히는데 혹시 아시는분 계실까요?
좀 도와주세요.