Hello,
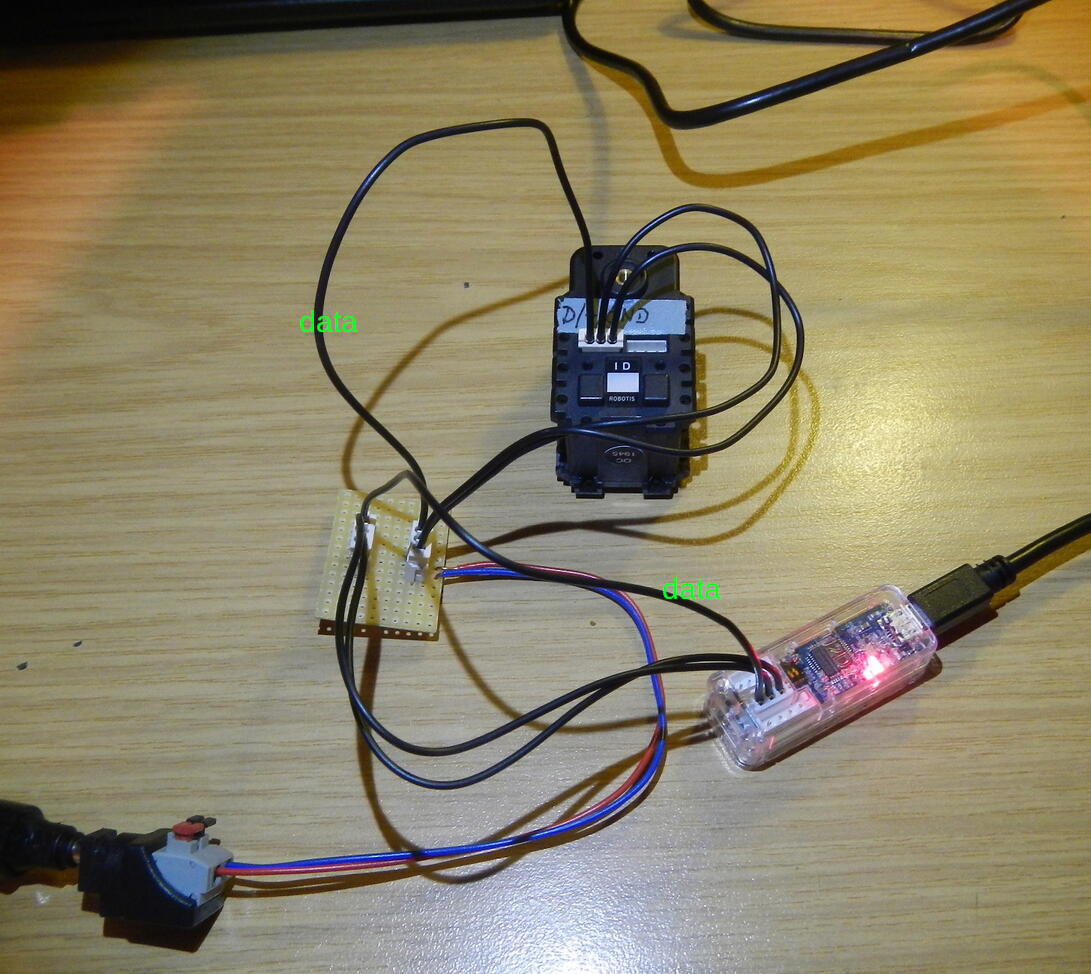
now i have an U2D2 attached to my computer and an AX-12A behind it. I downloaded and installed the DynamixelSDK-3.7.31 and compiled the ping example (linux64).
Running the ping executable flashes the green TXD led at the U2D2 and leads to following output:
$ ./ping
Succeeded to open the port!
Succeeded to change the baudrate!
[TxRxResult] There is no status packet!
I have following settings (ping.c):
// Protocol version
#define PROTOCOL_VERSION 1.0 // See which protocol version is used in the Dynamixel
// Default setting
#define DXL_ID 1 // Dynamixel ID: 1
#define BAUDRATE 1000000
#define DEVICENAME “/dev/ttyUSB0” // Check which port is being used on your controller
(further lines of code unchanged)
Any hints why it does not work?