Issue:
Bug in TASK V.3.1.11
DYNAMIXEL Servo:
XL-330 M288 T
DYNAMIXEL Controller:
LIST ALL DYNAMIXEL CONTROLLERS USED IN THIS PROJECT
OpenCM-904
Software Interface:
TASK V.3.1.11 and MANAGER 2.2.34
There is a bug in the MOTION EDITING TOOL
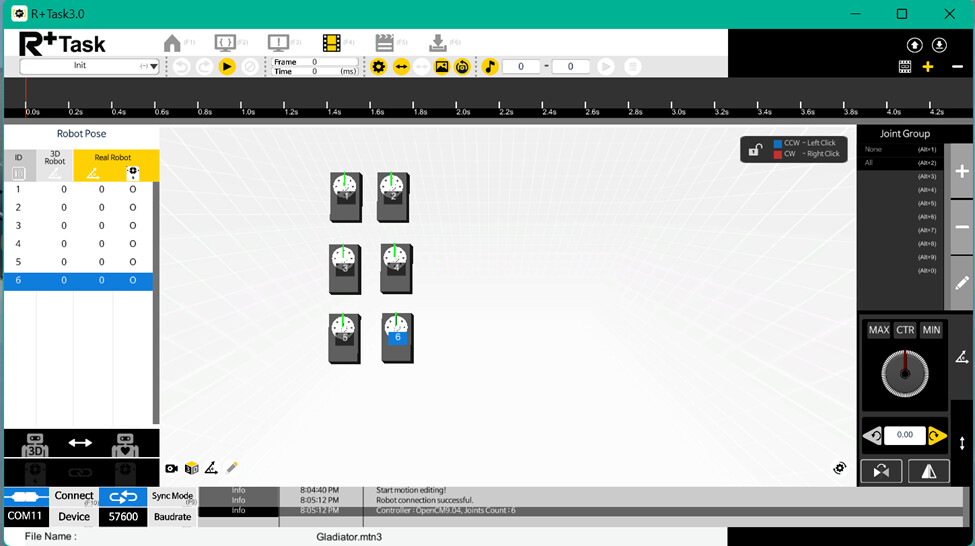
You can see that I am using a Custom Robot with 6 XL-330s, I have put them is Sync Mode, and I have set them all to CENTER GOAL POSITION (i.e. 2048 in Raw Ticks), and you can see that the software responded that all servos were at 2048 (i.e. 0 degrees). But PHYSICALLY on the real robot, all DXLs were set to a GP of 3072.
And when I switched to MANAGER 2.0 to check this same PHYSICAL ROBOT POSE, MANAGER does report that all DXLs are set to 3072 - as it should be.
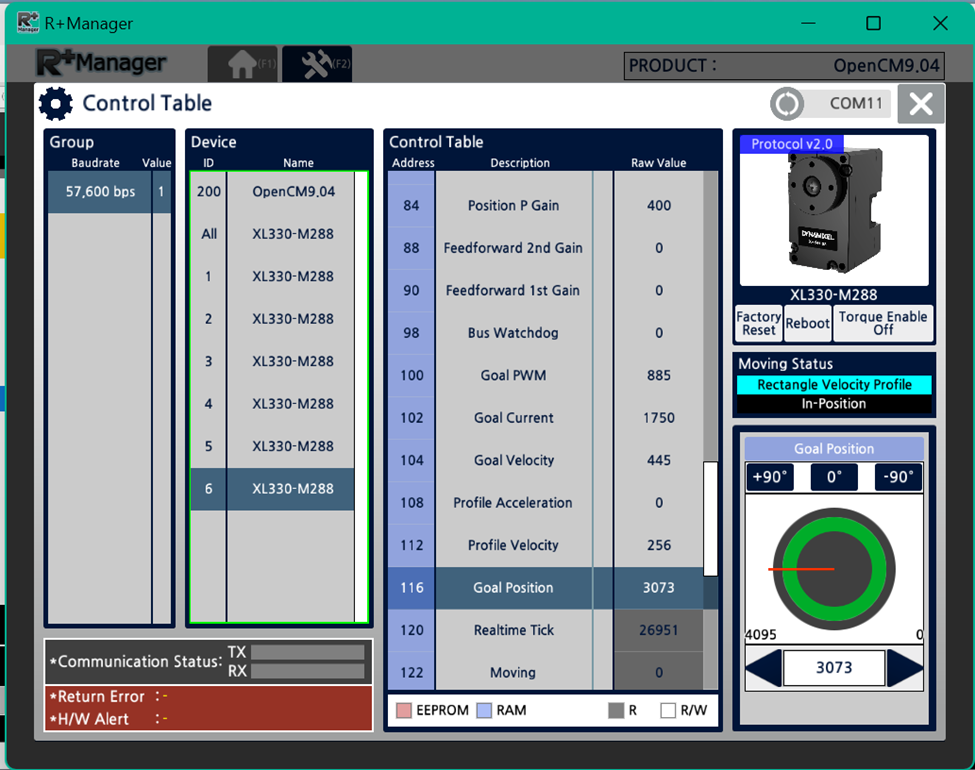
So somewhere in the code of TASK V.3.1.11 there is a formula that somehow adds 1024 to all the DXL’s Goal Position entered by the user’s interface?
Please help check whenever possible.
With much appreciations.