Hi everyone. I’m new in Robotis and Dynamixel motors. I have to build a robot with 4 Dynamixel XM430-W350 R (RS 485), controlled by Raspberry pi. I looked some videos that suggest to use U2D2 with U2D2 PHB to interface Raspberry with motors. I’d like to put 4 motors in 2 daisy chain, using 2 RS485 ports in U2D2 PHB. In order to assign IDs for each motor, is sufficient the hardware that I’ve chosen? Should I buy anything else?
Edit: I have a DYNAMIXEL Starter Set, with SMPS.
1 Like
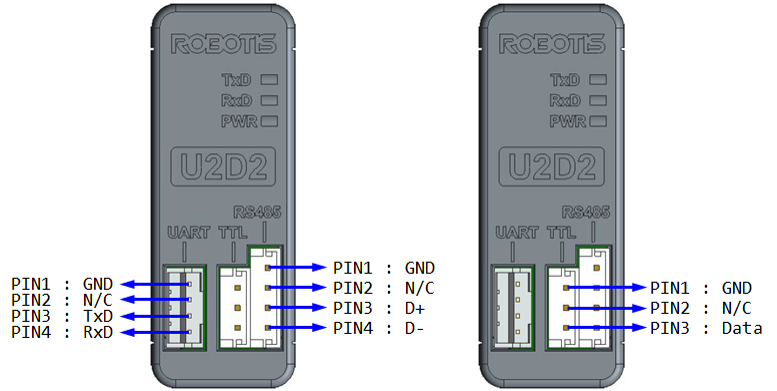
U2D2 does not power your DYNAMIXEL (Vcc line is vacant as the attatched image). SMPS or external power source is neccessary to power. If you have DYNAMIXEL Starter Set, that should be enough as it accompany all you need(SMPS,12V 5A; U2D2 and PHB board!
Yes of course! My question is about ID assignment.
If these are brand-new DXLs, they all have the default ID=1. To be safe, usually I physically labeled each DXL with the actual ID that I wanted for them. Then I hooked up 1 DXL at a time to the U2D2+PHB and used Dynamixel Wizard to change its ID to whatever was needed.
ROBOTIS made this video that has all the details
1 Like