Hello Willison,
Could you specify the exact model name of the ESP32 board you use?
→ ESP32 Devkit V1
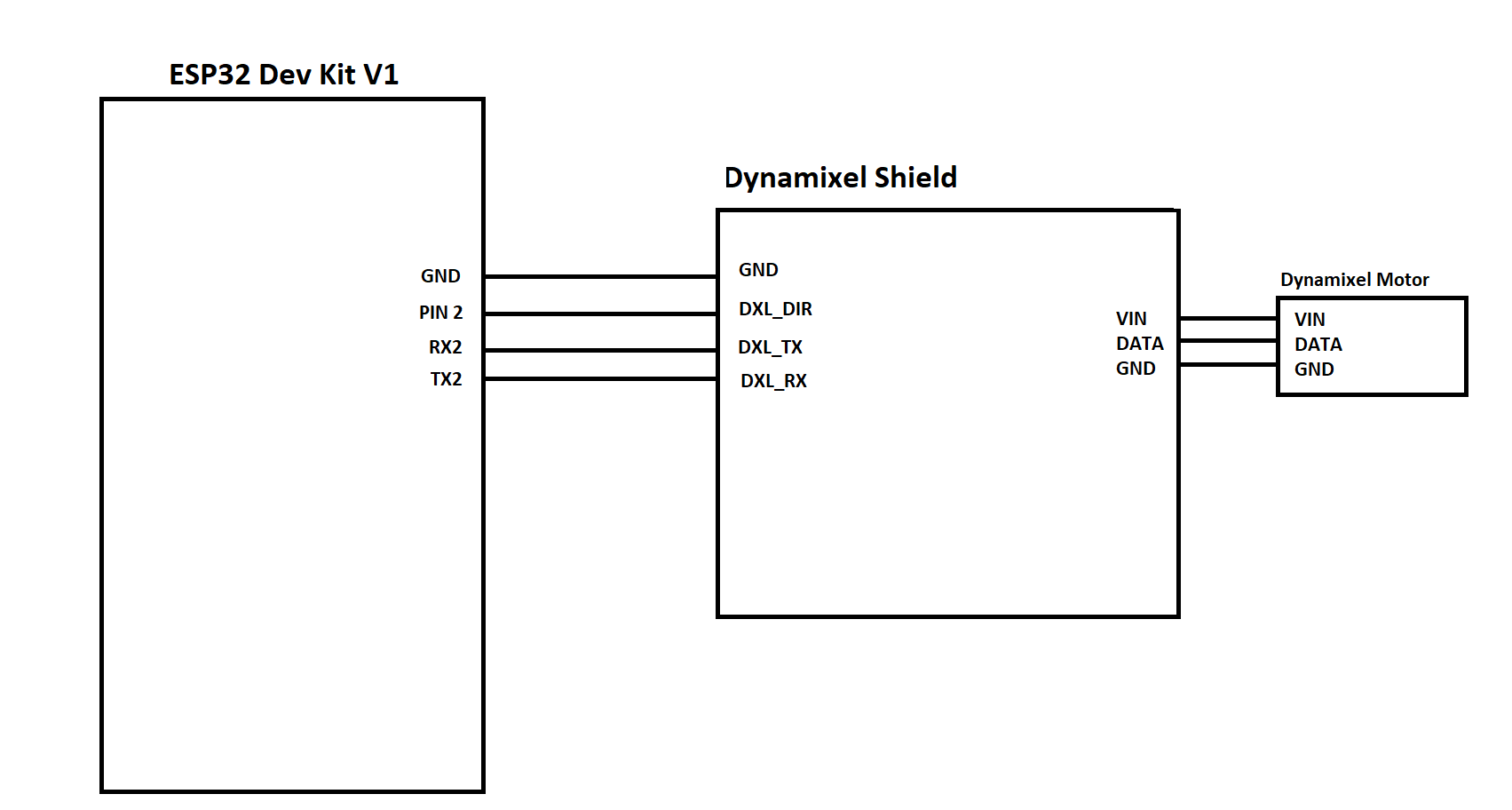
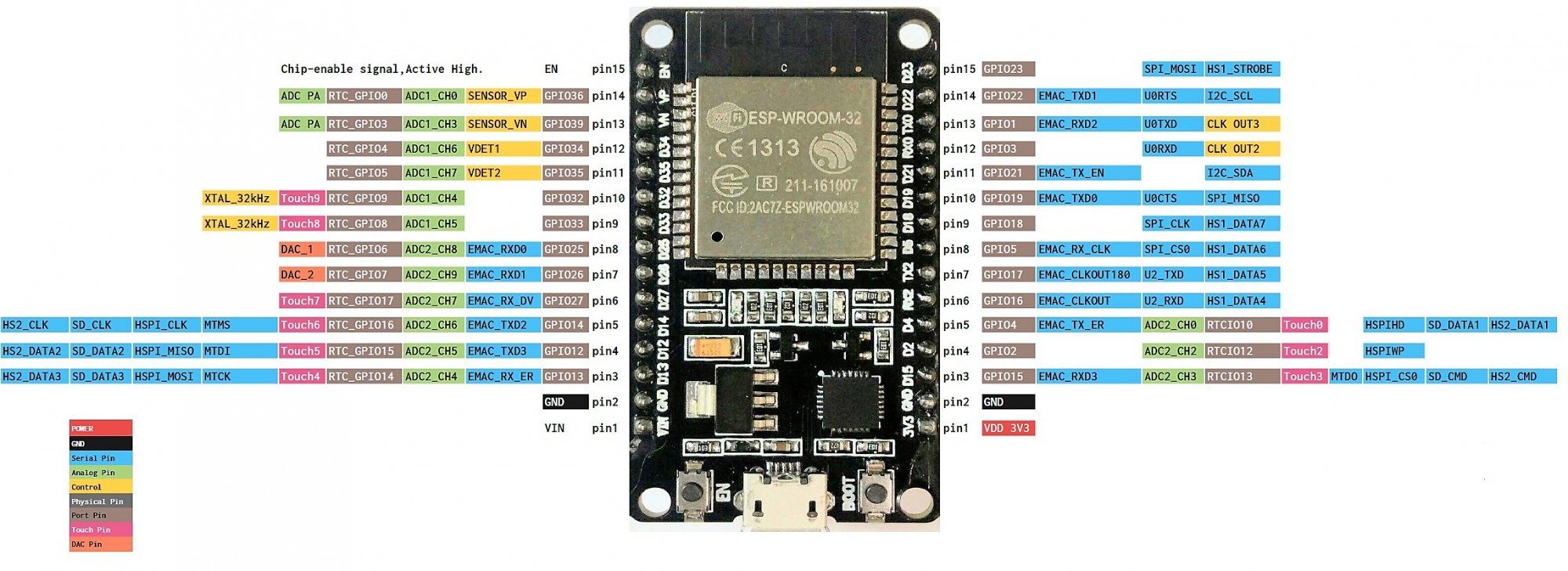
Does the PIN2 in your diagram mean GPIO2 in the image below?
→ Yes
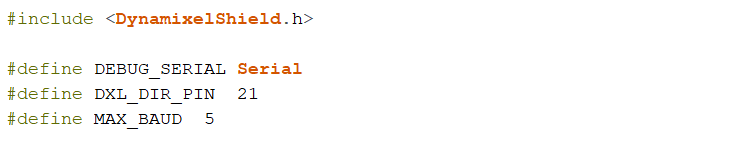
I checked and modified the pin definition the results are shown below:-
- For Tx0/Rx0
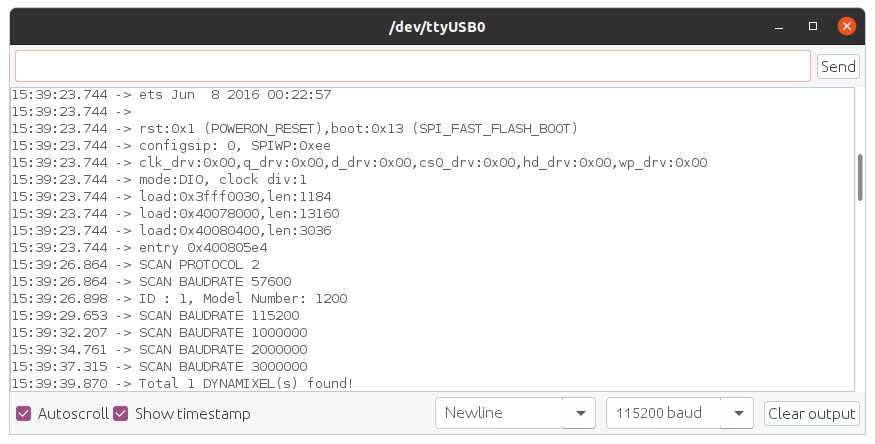
The output I am receiving is
rst:0x8 (TG1WDT_SYS_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00
mode:DIO, clock div:1
load:0x3fff0030,len:1344
load:0x40078000,len:13864
load:0x40080400,len:3608
entry 0x400805f0
SCAN PROTOCOL 1
SCAN BAUDRATE 57600
ets Jun 8 2016 00:22:57
I also faced an error while uploading, when I connect Rx/Tx for ESP32 and Dynamixel shield and try to upload code I see the following error. Maybe because ESP32 USB also uses serial(Tx0/Rx0).

- For Tx1/Rx1
By changing serial to serial1 in code and keeping the connecting Tx0/Rx0 of Esp32 to shield we got the following output, we also tried to change it to Tx2/Rx2 but same output.
rst:0x8 (TG1WDT_SYS_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00
mode:DIO, clock div:1
load:0x3fff0030,len:1344
load:0x40078000,len:13864
load:0x40080400,len:3608
entry 0x400805f0
ets Jun 8 2016 00:22:57
There is no pin in ESP32 labeled as Tx1/Rx1. ESP32 will crash if use them more details are here
The last attempt, connecting Tx2/Rx2 to shield. Changing serial to serial2 output is shown below:-
rst:0x8 (TG1WDT_SYS_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00
mode:DIO, clock div:1
load:0x3fff0030,len:1344
load:0x40078000,len:13864
load:0x40080400,len:3608
entry 0x400805f0
ets Jun 8 2016 00:22:57
I also checked other baud rates like 57600 or 1000000 but got garbage values on the serial monitor.