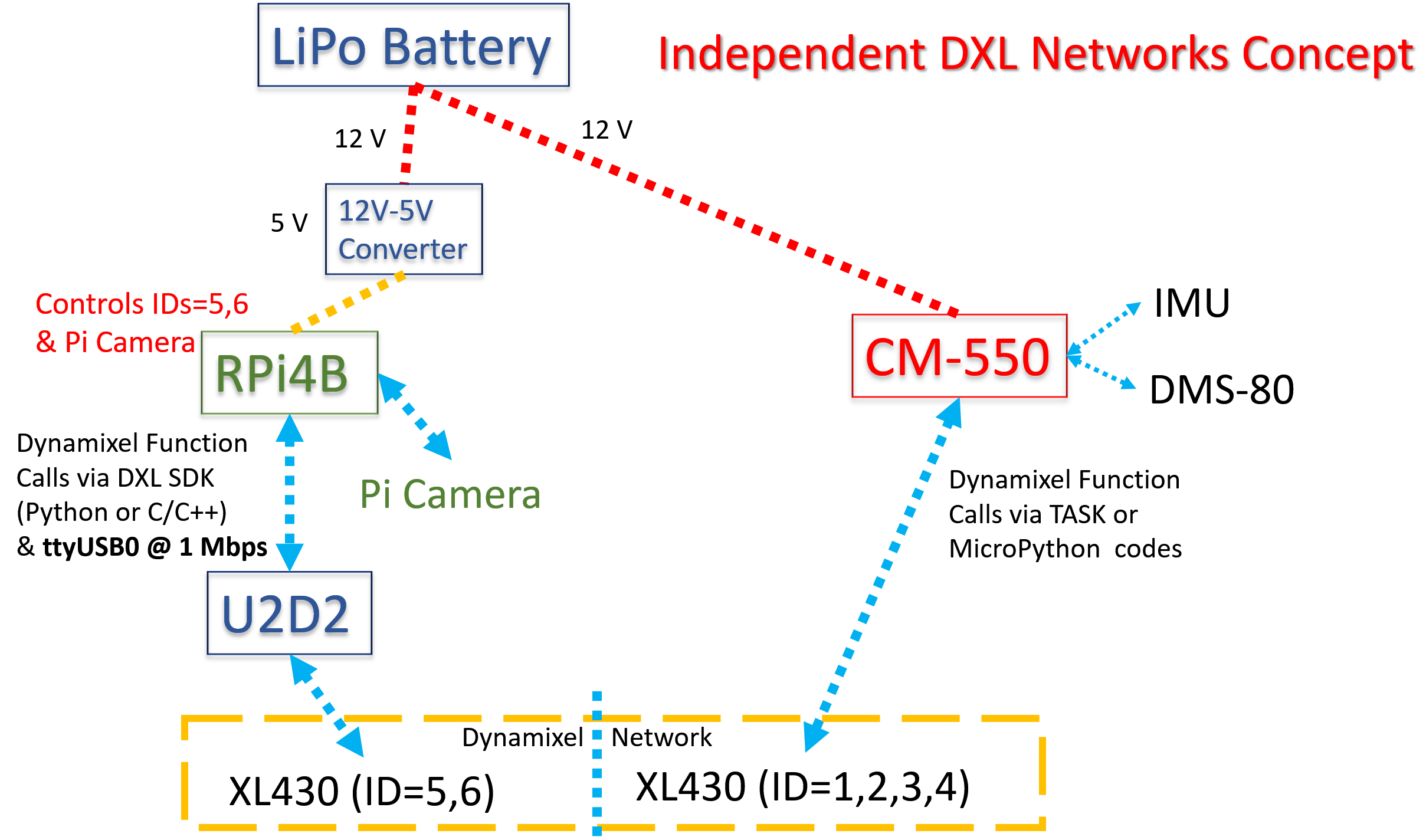
I had been working on a hybrid-control project using DXL-SDK on an RPi4B via U2D2 while keeping the CM-550 running on its standard tools such as TASK and MicroPython, and I had found that each controller would need its own DXL domain/network (see picture below).
One possible solution which is shown below is to “rewire” the 3-Pin TTL cabling system that connects all the DXL actuators. Interested users can view this video link for more details:
I think it is a bit extreme cutting the cable to achieve what you want. For ID=6 and ID=5 you should be able to attached GND and VDD directly to your battery and the data line to your RPi then have those 2 servos with no connection at all to the CM-550.
@Out_of_the_BOTS
Yes, that is another feasible approach too. It was quicker for me to sever the DATA Line than create a special cable to tap into the same CM-550 battery (or use a separate battery). Also with my way, I can unplug the “intact” 3-pin cable at the U2D2/ID=6 interface and plug it back into the CM-550’s DXL bus and the CM-550 “sees” IDs 5 & 6 again.
The same “cable-snipping” technique, but applied to the VDD wire, can provide a simple solution for controlling a mix of Dynamixels which operate at different input voltages: