I am looking for dynamixel motor for gripper application, which is driven by two motors (one motor per arm). I have torque requirement of 9.5 Nm per motor.
After going through website, i got MX-106 and XH540-w270, but i am little confused with respect to torque mode control & gripper application.
can anyone suggest the perfect fit for this application.
@Nikhil
Please note that the Stall Torque for DYNAMIXEL is not a continuous torque that you can continuously operate.
If you take a look at the performance graph section, the Stall Torque is quite different from the conventional RC servo’s measuring method, but is more like an industrial method.
Keep using MX-106 or XH540 with 9.5Nm may cause shutdown error to protect the hardware.
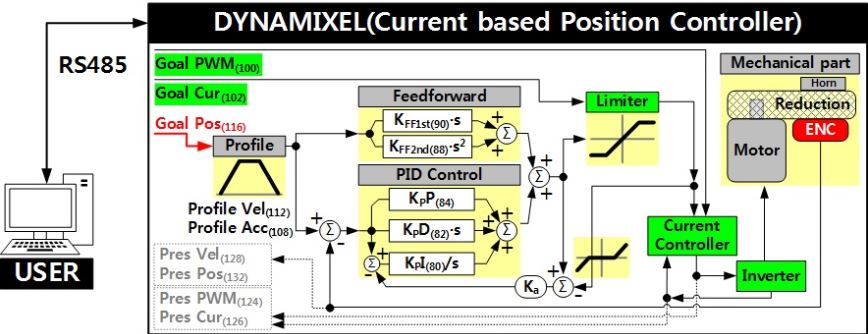
Below is the control diagram of Current Based Position Controller which could be used for gripper applications.
I’d recommend to use P series for higher torque range.
Please be aware that there’s quite a big gap in its weight which may not be an ideal solution for end-effector if you are planning to design a small arm.
Thank you.