Hello everyone,
I am using a Dynamixel MX 106T(2.0) and controlling it with Matlab.
I would like to make the motor follow a set trajectory with a certain rotation speed (not constant for each step).
I have tried in extended position control mode, scrolling the goal positions within a vector but the movement is not smooth, it is jerky. it is as if the motor stops when it reaches a goal position and then starts again to reach the next one
Is it possible to achieve smooth movement in extended position control mode or only in velocity control mode?
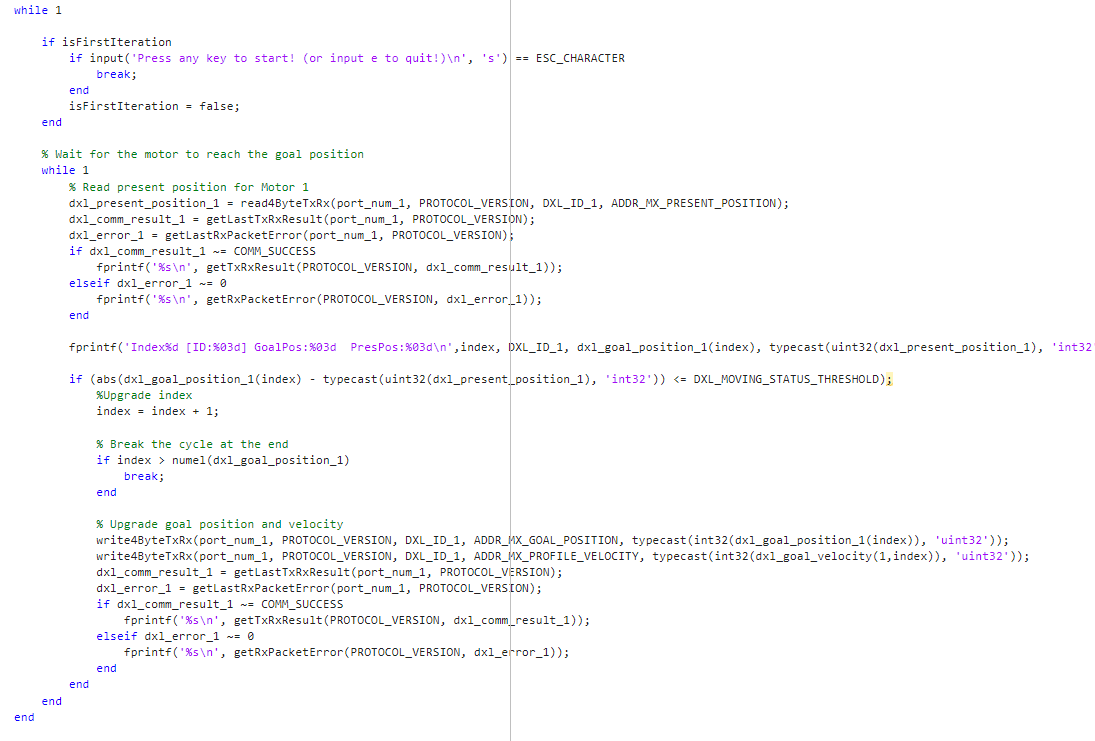
Instead of waiting for the servo to arrive at the commanded goal position, you can update the goal a little bit before the servo arrives at the previous one maybe by doubling. That would probably be the simplest method to smooth out this motion, since the next trajectory will be created before the servo completes the previous movement.