I am trying to control the MX-106 servo by setting the Profile Velocity and Profile Acceleration under Current-based Position Control Mode using the Wizard software. However, I am not getting the trapezoidal velocity in the graph.
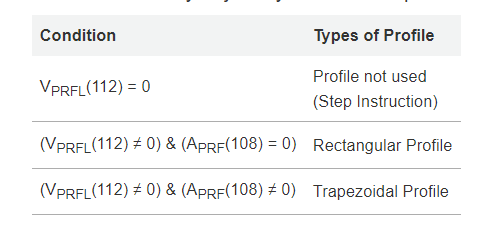
Following Profile details;
That means, to get the trapezoidal Profile, Profile Velocity(112) and Profile Acceleration(108) shouldn’t be equal to zero. Here I tried with random values however it seems none of them worked.
Therefore, what values should I set for the Profile Acceleration? to make it not equal to zero to get the trapezoidal Profile.
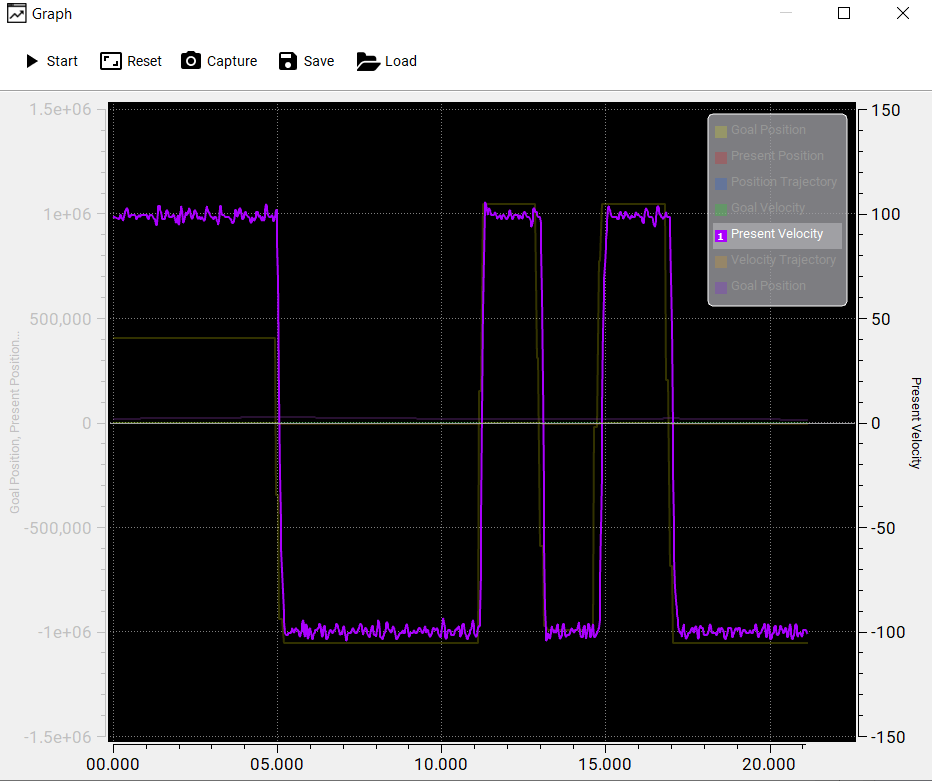
And, by checking the graph with these values, it shows;
Actually, it is showing the rectangular Profile which may be because of the Profile Acceleration value is not right. Can someone guide me how I can get the trapezoidal Profile to control the MX servo using U2D2 hardware with Wizard software?
I was doing mistake here, however when I set the values for the Profile Acceleration less than the Profile velocity’s rev/min values then the trapezoidal velocity graph can be seen.
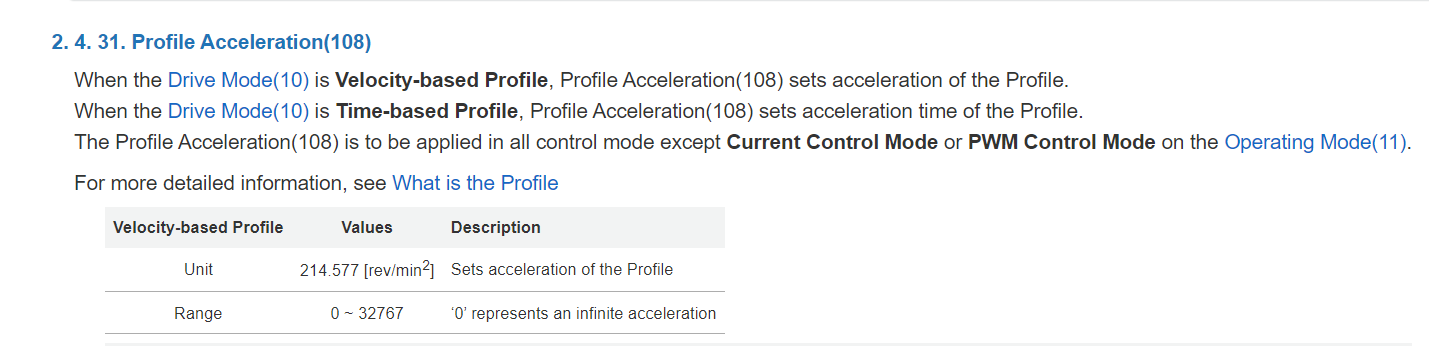
However, I still don’t understand for the Profile Acceleration. I can see the unit values for Acceleration. But what they defines?
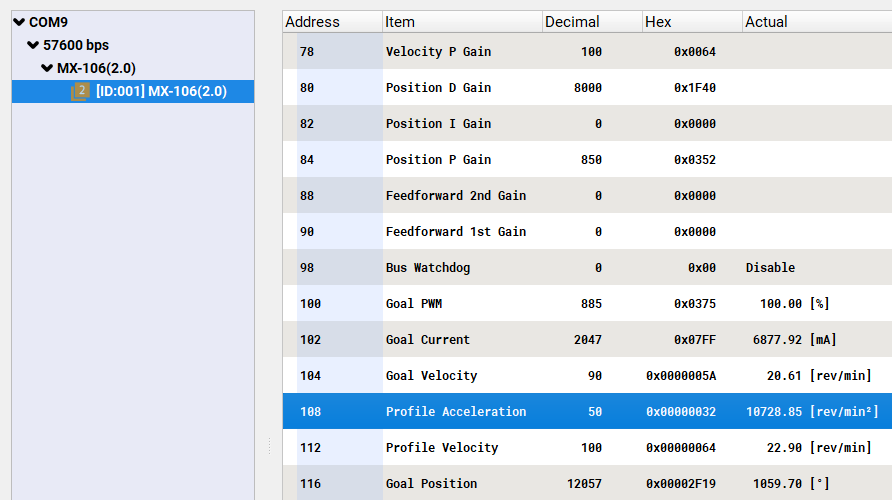
My question is how much is the acceleration? when i set Profile Acceleration as 50 as in case;
where i was trying to get the trapezoidal velocity profile.
In the free Kindle sample of my Engineer Systems book there are lots of discussions about Profile Velocity and Profile Acceleration interactions - may be they can be of use to you:
Read Section 2.1.3 and study Fig. 2.14. See how t1 is computed from Profile Velocity PV and Profile Acceleration PA and the use of the conversion factor (66 for my case - but the official Robotis constant is 64).
With your numbers, your t1 should be around:
t1 = 64 * 100 / 50 = 128 ms. Did you get that 128 ms on the graph of the DXL Wizard?
According to the e-manual information for MX-106 the unit for Profile Velocity is 0.229 rpm so a value of 100 would correspond to 22.9 rpm or 22.9/60=0.3817 rev/sec. So the “regular” Angular Acceleration is PV/t1=0.3817/0.128=2.98 rev/sec/sec.
Another way is to use the unit of PA which is listed as 214.577 rev/min/min. So a value of 50 would correspond to (50*214.577) / (60 * 60) = 2.98 rev/sec/sec also. So use either way that you like best.