안녕하세요 다이나믹셀 프로를 이용하여 양팔 로봇의 매니퓰레이터를 제작하려고 합니다.
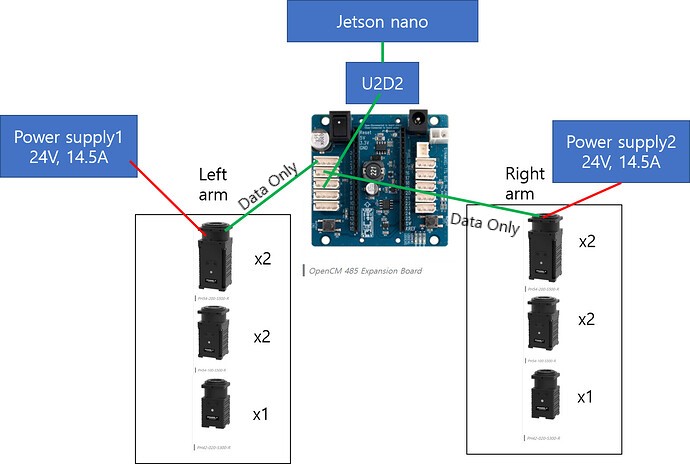
(각 팔 당 54-200 2개, 54-100 2개 그리고 42 020 1개)
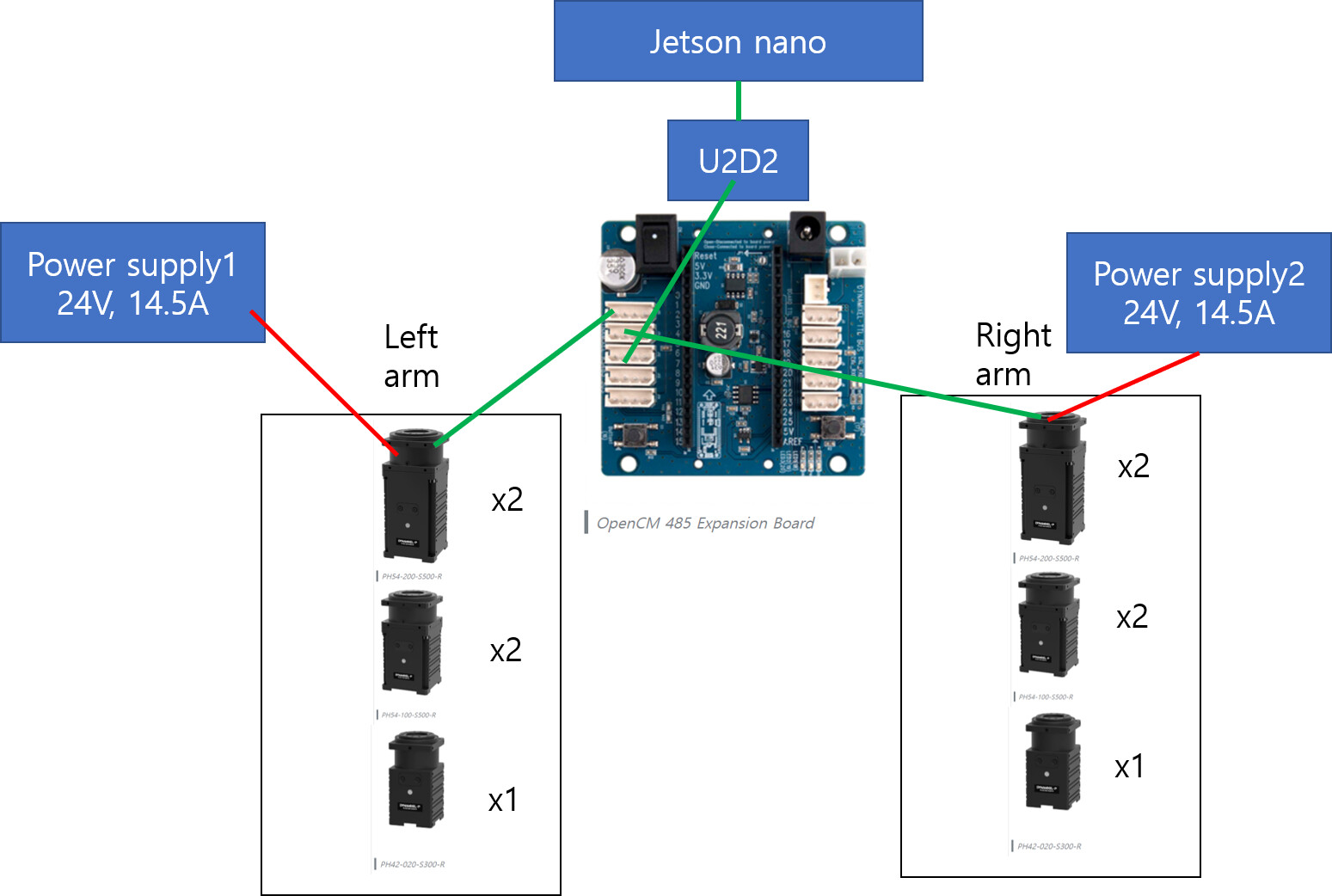
위의 사진과 같이 왼팔 오른팔 각각 데이지 체인 방식으로 연결 후 OpenCM 485 expansion를 통해 연결하여 하나의 U2D2로 Jetson nano와 연결하여 사용하려고 합니다.
즉 하나의 U2D2를 사용하여 2개의 데이지 체인으로 연결된 모터 쌍을 각각의 전원을 이용하여 동작시키고 싶습니다.
위의 연결 방식일 때 왼팔 오른팔에 각각 다른 파워 서플라이를 통해 전원을 공급해도 괜찮을지 궁금합니다.
혹시 안된다면 expansion의 Vcc, GND 핀을 제거한 뒤 데이터 핀만 연결한 다음 각 팔에 서로 다른 파워서플라이를 통해 전원를 공급해도 괜찮을지 궁금합니다.