Use the following template to help create your post:
- What model(s) of servo are you using?
AX-12a and AX-18a
- Describe your control environment. Include the controller or interface, operating system (and version #) of your computer, and how you are powering your robot.
Using a U2D2 with the U2D2 Power Hub in Windows 10 version 21H2 (19044.1706) and MATLAB 2022a with Simulink version 10.5 (R2022a)
- For programming posts, state any libraries or example code you are using. For software posts, be clear about which version of software! R+ Task 3.0, R+ Task 2.0, and RoboPlus Task (“1.0”) can have very different troubleshooting steps, as just one example.
Using DynamixelSDK version 3.7.51 from GitHub
- Remember to mark your post Solved when applicable!
Hi everyone,
I have been working with Dynamixel Servos for a while, but recently, I want to use the SDK in Simulink. As far as I know, there is not an official version which works in Simulink, so surfing a little on the Web, I found this solution:
I can run servos with this solution, but I got curious if I could use the headers and libraries from the SDK to make blocks using those files. Simulink has that ability in a block called C Caller, also, it has an application called Code Importer which can make blocks using the headers and libraries. It has a Wizard to make this process easier, in a way similar if you are setting up the SDK for LabVIEW.
So, i began to try it, and i can get to make the library to work with almost all of the functions in the SDK, as you can see here:
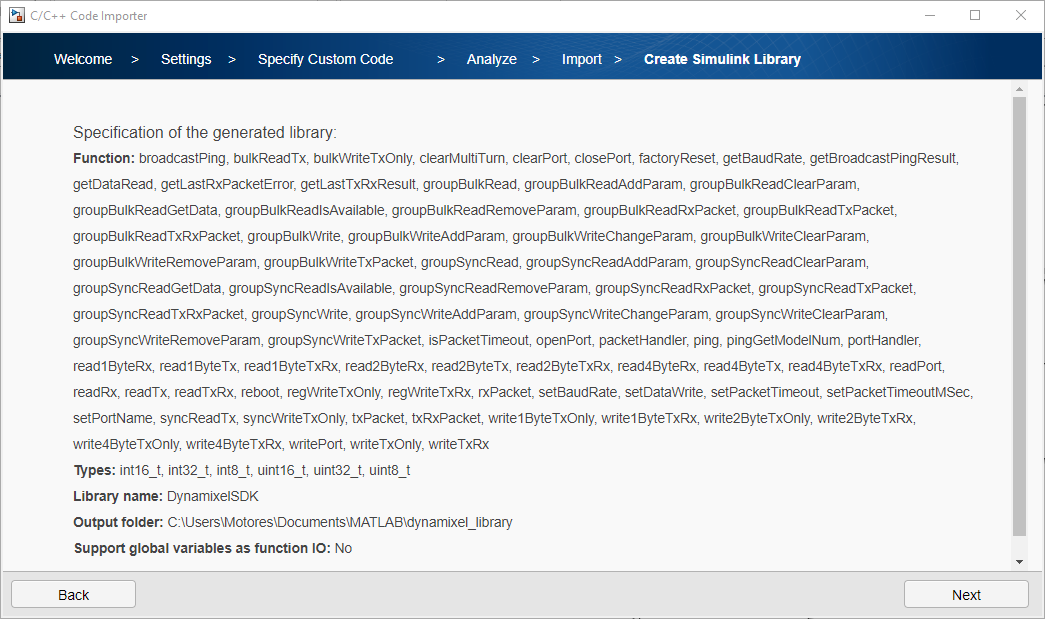
I’m using this setup to make the custom blocks from the Wizard:
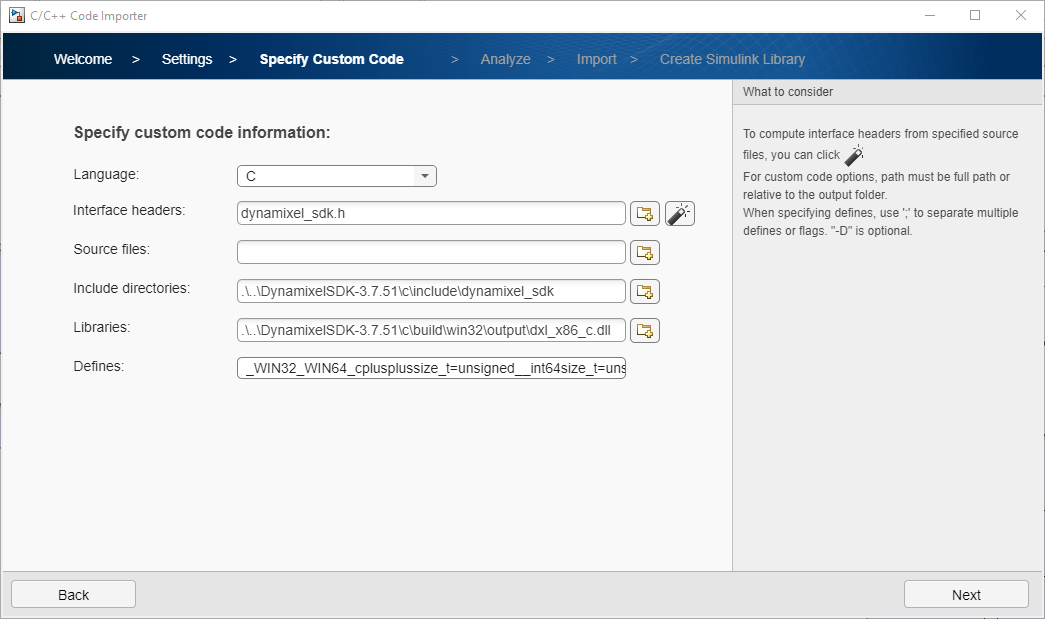
Basically, I’m using the x86 libraries and the header, because if I use the x64 libraries, the wizard cant make the blocks.
I even trying to recreate the examples from LabVIEW into Simulink, like the Ping example:
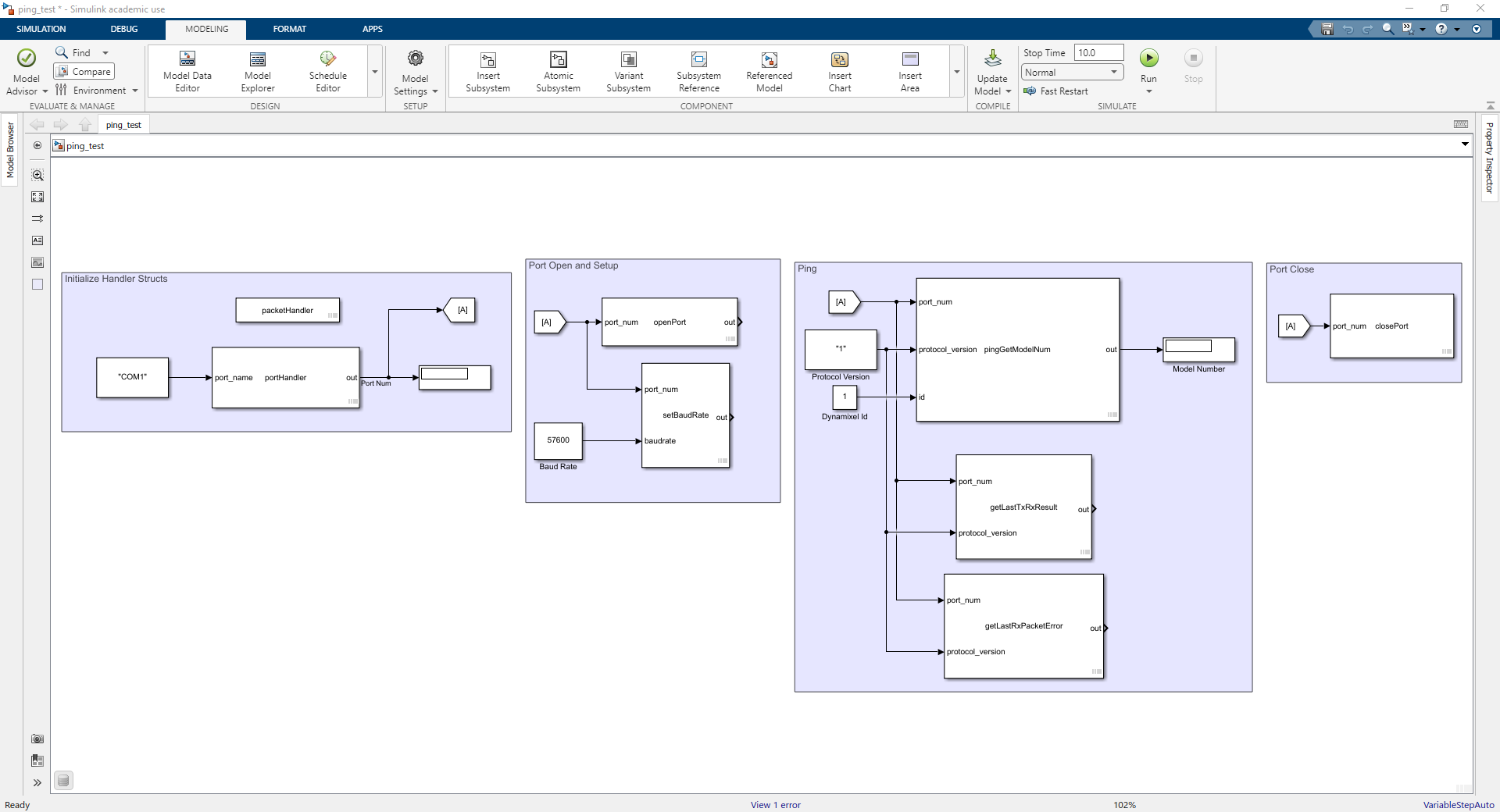
But, as soon I want to execute the program, I receive this error:
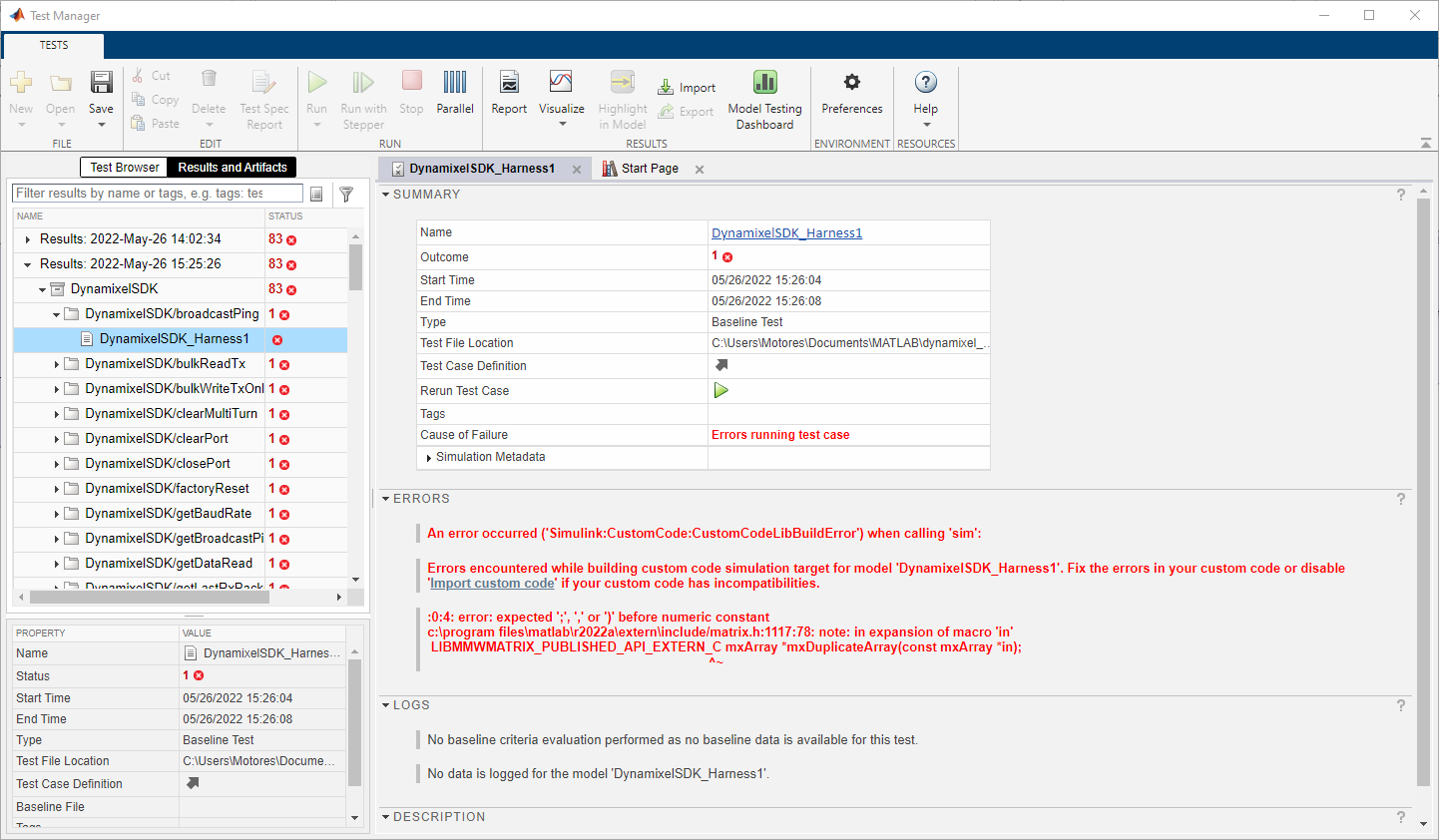
I kind of stuck at the moment, so thats why Im asking for some advice.
Thanks in advance.