Hello,
I’am still fighting with the AX-12A.
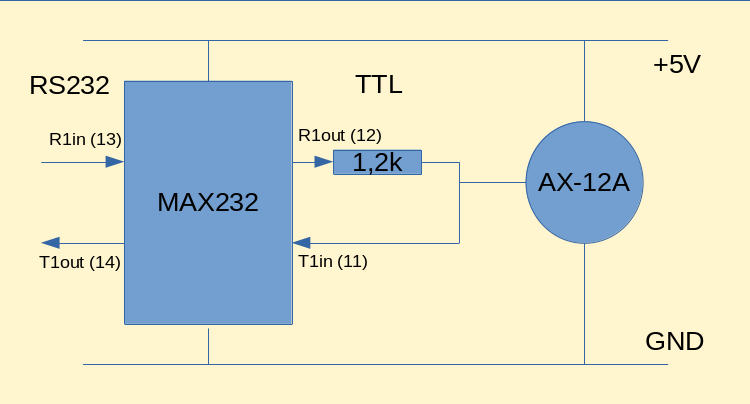
I use now a MAX232 converter IC, which does convert RS232 signals to TTL and vice versa.
I input signals (instruction packet, i.e. “ping”) at the RS232 side of the MAX232 and connect on the TTL side just RX and TX…
Thats like connecting RX and TX, but with a conversion RS232->TTL and back TTL-RS232.
Thus, I can hear my own echo on RS232 (it works, i tested it).
Now, i connected the AX-12A to the TTL side. I added a resistor of 1200 Ohms, because I was unsure, if the output driver of the AX-12A is able to pull down the MAX232 to ‘0’.
It looks like this:
Ihe serial interface is set to 8N1, no handshake.
Well, I can still see my own echo, but there is no answer from the AX-12A. Just nothing.
I send “ping” packets with ID = 1 (as described in the manual), and ping packets to broadcast address 0xFE, i.e. “0xFF 0xFF 0xFE 0x02 0x01 0xFE”, in order to receive a status packet.
I tried several baud rates, between 115kb and 9,6kb, but i got NOTHING except my own echo.
I took an oscilloscope and looked at the signals at RS232 and at the data input of the AX-12A:
an it seems o.k. (that is a broadcast ping, by the way…)
I changes the time axis to a larger time scale for seeing any activities after sending the ping, but agian nothing, not even a glitch or a peak.
So there is absolutely no reaction from the AX-12A, except a shot flashing of the led when powering on.
Any hints how I can establish a communication to that AX-12A device?
TIA