We put on OpenManipulator-X on TB3 Waffle Pi and setup the software by following the instruction on emanual:
TB3 Waffle Pi + OpenManipulator-X:
Raspberry Pi 4: Ubuntu 20.04+ROS Noetic (TurtleBot3 [Noetic])
OpenCR: (TurtleBot3 [Noetic])
Remote PC:
Ubuntu 20.04+ROS Noetic (TurtleBot3 [Noetic]))
Packages:
Turtlebot3: (TurtleBot3 [Noetic])
OpenManipulator-X: (OpenMANIPULATOR-X [Noetic])
TB3 manipulation: (TurtleBot3 [Noetic])
Steps on remote PC:
T1: roscore
T2: ssh to pi, roslaunch turtlebot3_bringup turtlebot3_robot.launch
T3: roslaunch turtlebot3_manipulation_bringup turtlebot3_manipulation_bringup.launch
T4: roslaunch turtlebot3_manipulation_moveit_config move_group.launch
T5: roslaunch turtlebot3_manipulation_gui turtlebot3_manipulation_gui.launch
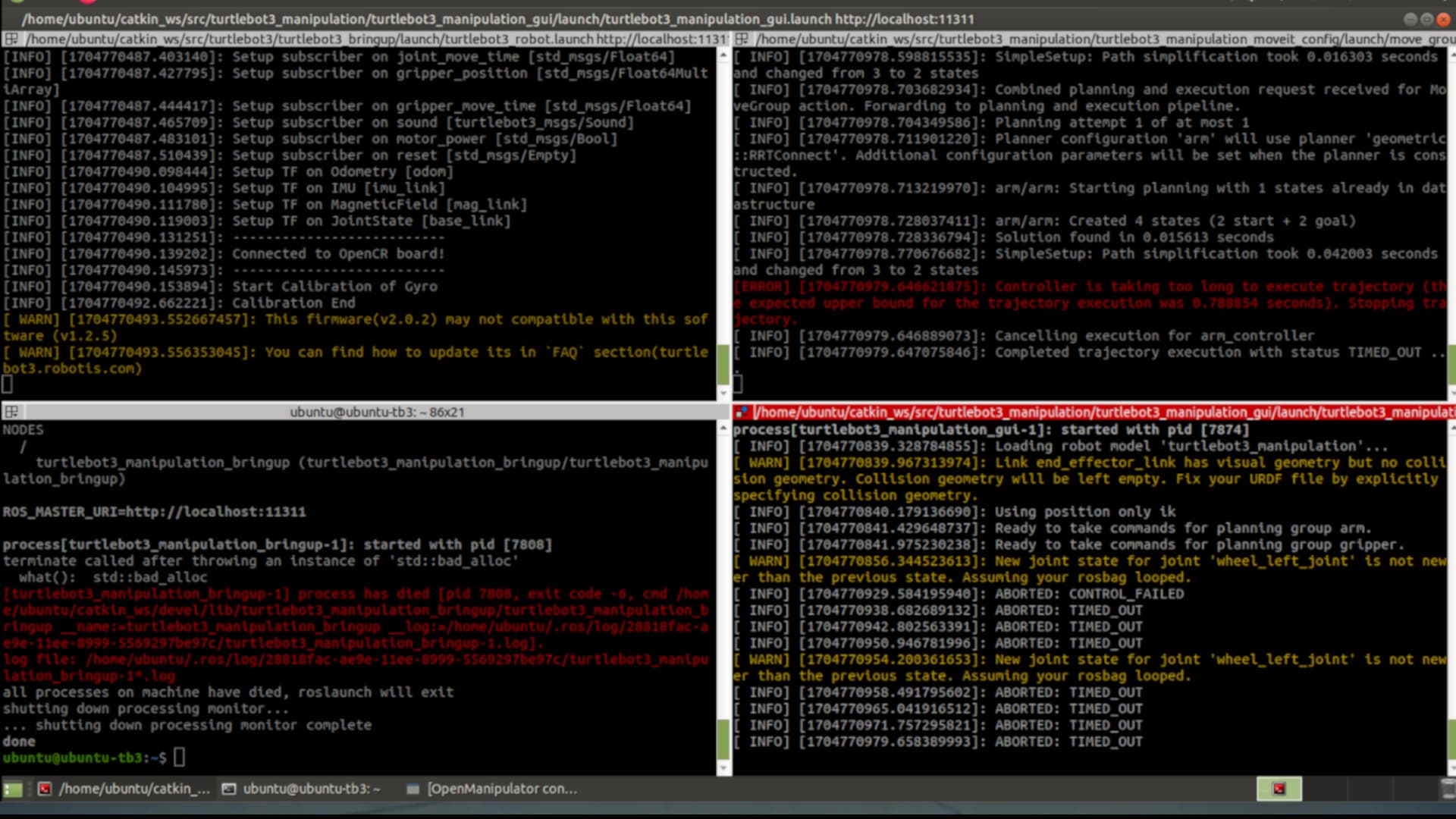
But problem always happen when try to move the arm in Task space or Joint space (also in RViz):
[ERROR] Controller is taking too long to execute…
Video1: 20231031_134737.mp4 - Google Drive
Video2: 20231031_134348.mp4 - Google Drive
Anything I missed out on setup? Any advice on solving this problem?