Hello there,
I was working with TASK V.3 (Motion Tool) and using the MAX-E2 example Motion Units (see enclosed screen capture)
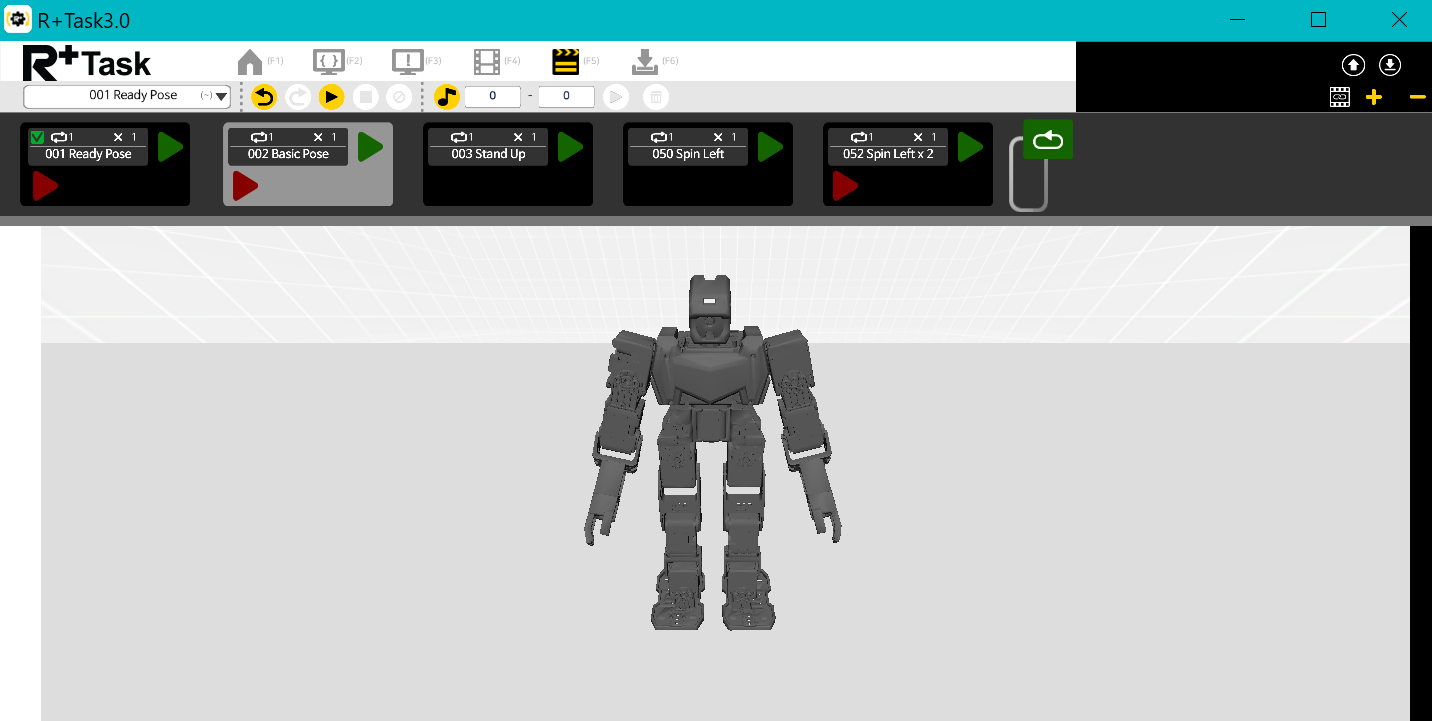
And I noticed that some Motion Units allow me to add Exit Motion and some don’t. How was that decided by the TASK tool?
Thanks
Hi there roboteer! Thanks for your post and apologies for the delayed response. I’ve been so occupied setting up the category pages here that I didn’t realize this was posted.
My team and I have had some time to investigate the issue and I believe it is due to the overall data size limitation of Motion Units in the R+ Task 3.0 software.
- Each Motion Unit is allowed ~512 bytes of data to record the robot’s position via Key Frames.
- As a result, Motion Units with a high number of Key Frames may be too “full” to have space to assign the Exit Motion. It seems that 7-8 keyframes is the upper limit for Motion Units to have space to assign an Exit Motion.
- To help address this concern for any future users, our team has added a note to our online e-Manual for the software:
WARNING : The
Red Arrow, Exit Motion, may not be displayed and not available to use if the sum of used-keyframes’ size in a motion unit exceeds its assigned space in a motion unit. To use the Exit Motion, please use the Keyframes from 7 to 8 approximately. But note that the available numbers of keyframes may differ depending on the remaining space in the motion unit.
Hopefully this helps!
Hi Andrew,
That is good to know.
Thanks.