Hello everyone
DYNAMIXEL Actuator
dynamixel XH430-V350-R
Issue Description
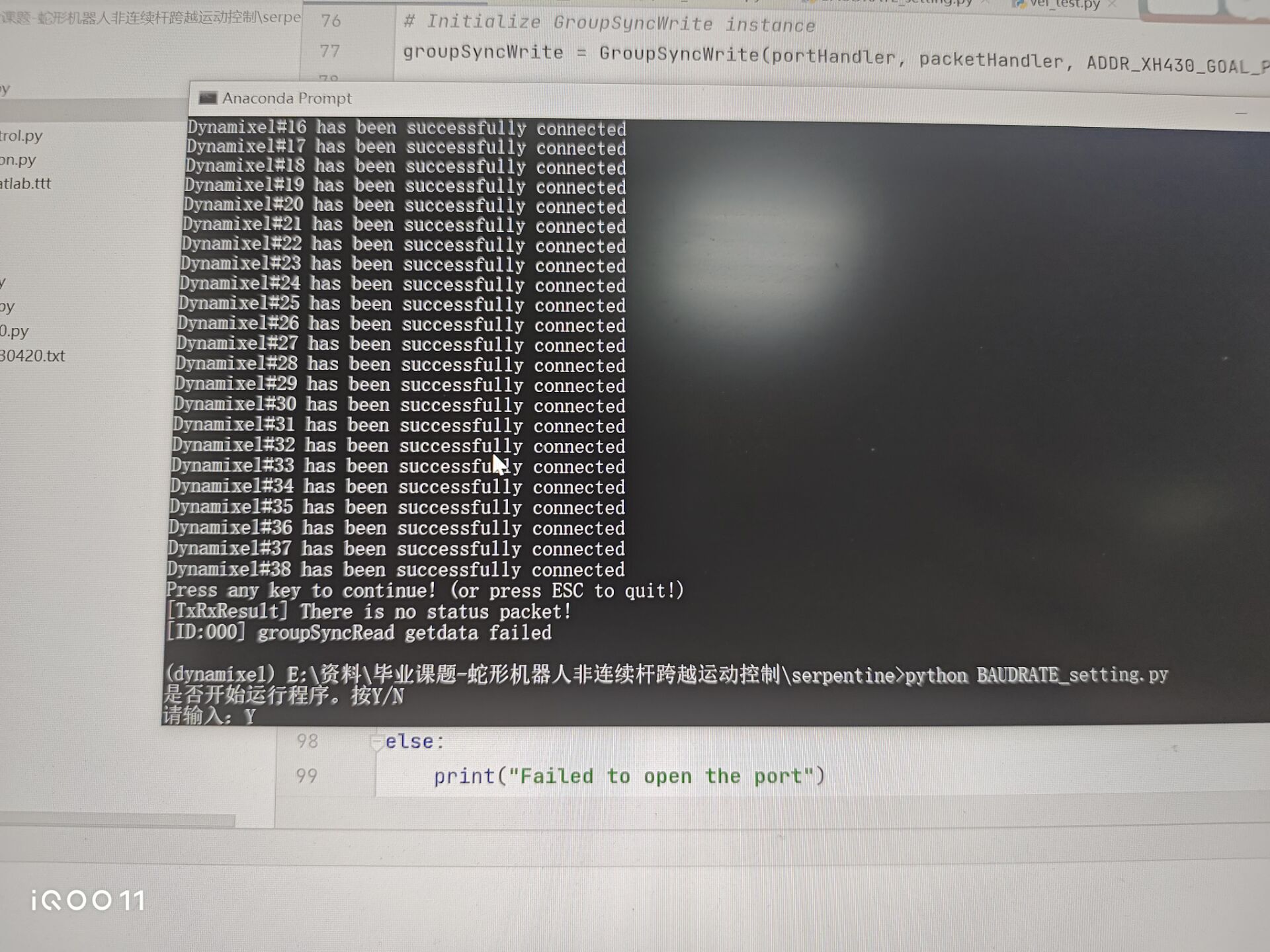
I used 39 dynamixel actuators on a snake like robot and wanted to read their present position and velocity. However, when using the bulk or sync commands in the Python SDK to read data, I always returned “There is no status packet!” and "groupsyncread getdata failed“
I tried a baud rate of 1000000,51200 and 115200 and changed the serial port latency timer to adapt to a higher baud rate, but none of these methods worked.
Thanks for reading, any suggestions/help are greatly appreciated!