A4WP-H Project
Previously, this A4WP-H robot had been controlled by an RPi0-2W and an OpenCM-904 - please check out this post:
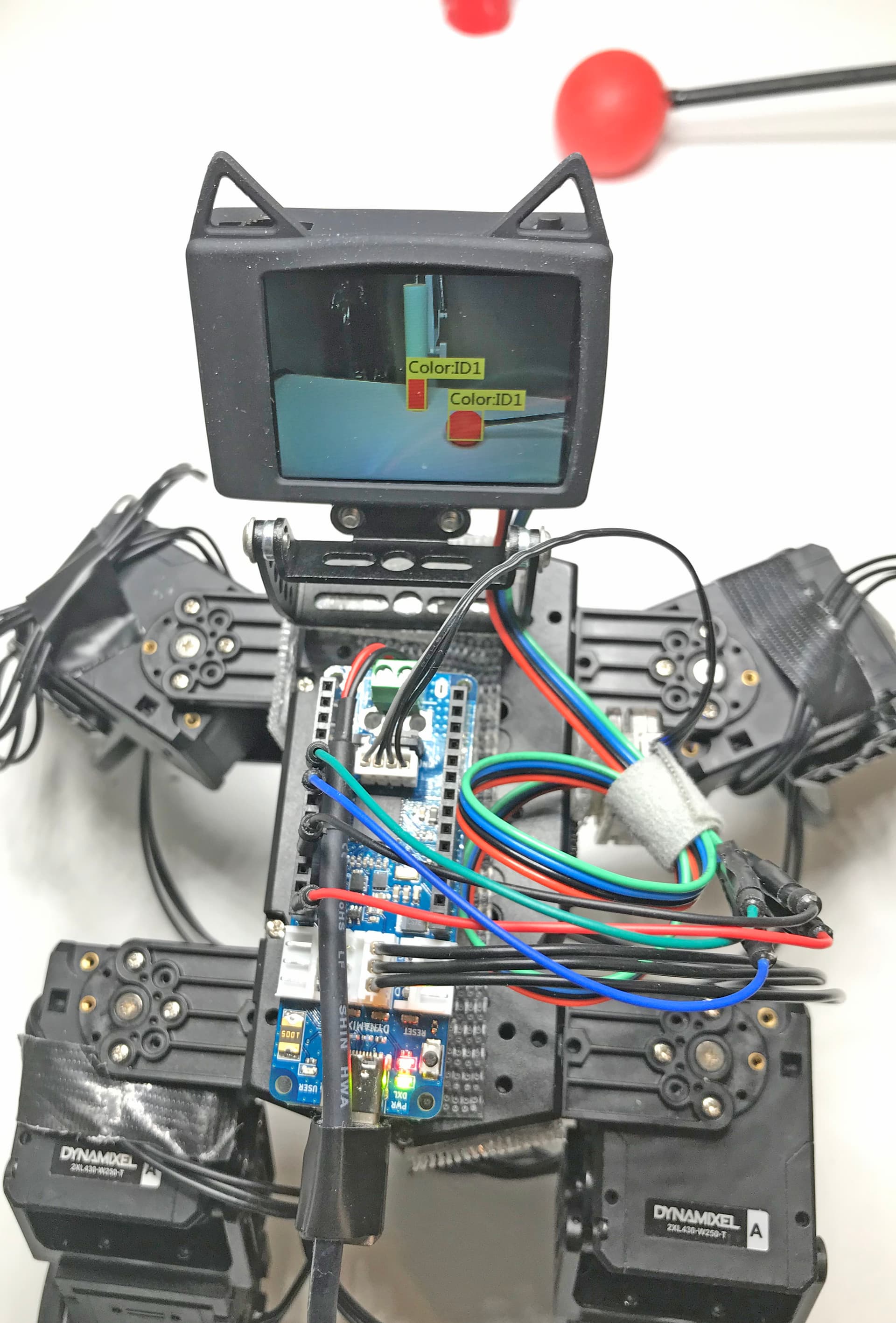
This time, I used the OpenRB-150 + HuskyLens camera and Arduino instead:
- Some of the XL-430s are in Timed Position Control mode so that the robot can be programmed to “walk” via SyncWrite. The ones with “wheels” are of course in Velocity Control mode.
-
The HuskyLens camera tracks the “red” objects very well (in I2C mode) but this process tended to “suppress” the RC-100 packet flow coming from the UART port, so I practically lost Manual Control when I set this robot to Autonomous Tracking mode.
-
Importantly, I had found that the OpenRB-150 will not work properly when its Voltage Input is over 11.1~11.2 V. So the standard 12V PS that comes with any ROBOTIS kit will not work for this board (although this 12 V PS had been working fine for me with Open904 and even MKR ZERO and DXL MKR Shield). I had to get a Continuously Variable PS so that I could figure out that it needed around 11.1 V. So hopefully this issue only happens for my particular board. May be other Beta Testers can share in if they encountered the same issue?