Hi, I’m Yoshi from ROBOTIS Japan.
I tried using HNX540-C101 that just-released on July 2021.
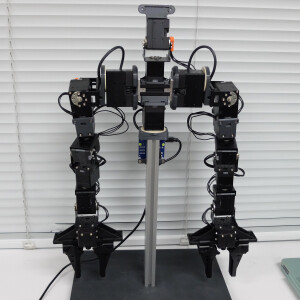
The application is a Humanoid robot upper body, the name is Rakuda-2.
The place is the turning axis of waist. As you all know, the rigidity of the servo flange is important because it creates a large load here.
Application : Rakuda-2
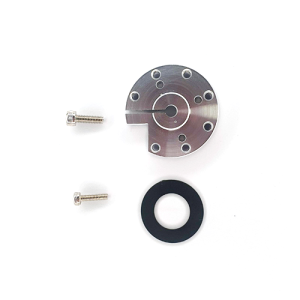
1. Attached to XM540. Horn is 4mm thick.

2. This time, I also use needle thrust bearings to increase the rigidity of the joints.


3. Insert Φ2 knock pin. This knock pin hole is my favorite.

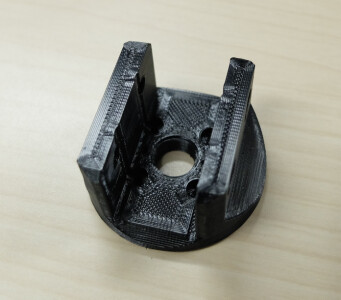
4. Attach the 3D printed bracket. This bracket’s material is Polymaker PC-FR. Rigidity is higher than ABS.

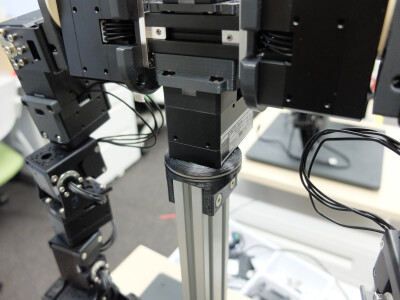
5. Assembled image. It looks rigid.

HNX also has X430 type. It may be good to use it for ID11 of OpenMANIPULATOR-X.
HNX430-C101 ROBOTIS Shop
HNX540-C101 ROBOTIS Shop
Rakuda-2 example Github