Hi @diegoene17, thanks for your question and for posting on our new page! Sorry for the slight delay in response; I’ve been offline for a bit working on projects. I should be able to share some information to clarify:
The current-based control modes for DYNAMIXEL XM430-W210, and other models of X-series that offer Current Control and Current-based Position Control, can be used for different applications depending on your goals.
Current Control Mode allows the user to specify a direct Goal Current that the DYNAMIXEL will use to turn endlessly in that direction, at the force allowed by the current level. This can be ideal for applications supporting / measuring a load, or for force-limited operation with gear reductions.
Current-Based Position Control Mode allows users to specify both Goal Current and Goal Position for the DYNAMIXEL to move to. While moving to the Goal Position, the DYNAMIXEL will work not to exceed the Goal Current. This can allow for force-limited motions in collaborative robots and other applications.
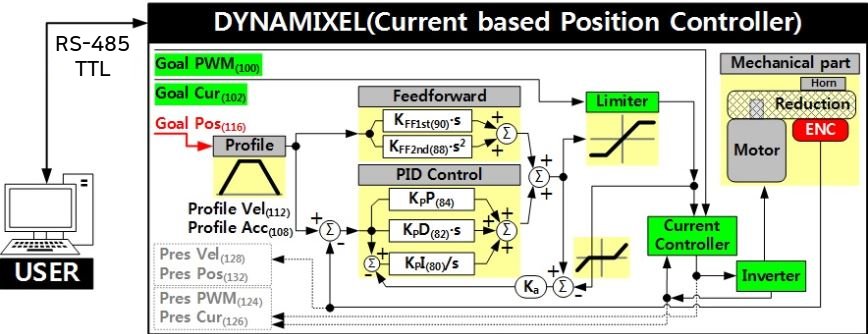
For block diagrams, unfortunately I do not have a specific diagram for the Current Control Mode, but the Current-Based Position Control mode diagram is listed in the e-Manual for XM430-W210 and I’ll paste it below:
Allow me to check in with @Tech_Support and @Yogurt_Man to see if they might be able to share more information on the current control mode block diagram.
Make sure to switch Operating Mode (11) to the Current Based Position or Current control Mode.
Honestly, the block diagram should be just used as the reference. You may want to see the Present Current(132), Goal Current(102) and Performance Graph. Generally, #1 a torque is proportional to the provided current to the motor, so that if you can control the providing current to the motor, you can control the torque (In this case, Goal Current is the reference) #2 If you can measure the current in the motor, you can actually sense the force by looking at the current (In this case, the Present Current is the reference)
The performance Graph is showing the conversion values between the current to the torque.
Will this mode work on the MX-28AT or AX-12 actuators??
By setting Operating Mode to Current-Based Position Control Mode. Can I set the current required to rotate the motor as well the position to stop the rotation???
I want to know irrespective of the operating mode whether I can retrieve the Values of Current, velocity ,position and torques or not???
For the AX-12 you can check all the modes that it can do and all the parameters that can be retrieved by reading their Control Tables - using this link