Use the following template to help create your post:
-
State the model of servo, or ROBOTIS edutainment kit, you are using.
Dynamixel MX-28AT(2.0) -
Specify which software you are using. Tag your post with the relevant software (or create a tag). (Note: “R+” is written in tags as “Rplus”)
Matlab -
Describe your control environment. This includes the controller or interface, operating system (and version #) of your computer, and any power source you are using.
3 Daisy chain servos controlled by U2D2 controller connected to a laptop operating on Window 10 home OS. The servos are powered using a 12V SMPS. -
For programming posts, state any libraries or example code you are using.
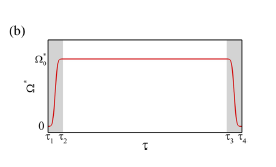
I am trying to generate a certain motion for which I require to control the servos in velocity control mode.
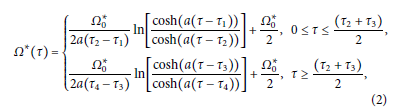
The details for the equation are attached and also the code snippet.
The issue is my motors doesn’t budge at all.
I have changed the code to address to working in velocity control mode.
phi = 120pi/180 ; % sweep
R = 0.146 ; % m
c = 0.073 ; % m
AR = R/c ;
Re = 5300 ;
kinematic_Visocity = 10^(-6) ;
f = Rekinematic_Visocity/(2phiR*c) ;
display(f) ;
omega_star_0 = 2phif ;
T = 1/f ; % sec
t = 0 : 0.005 : T ;
Dphi = pi/36 ;
a = 100 ;
Dt_flapping = Dphi/omega_star_0 ;
t1 = 0 ;
t2 = Dt_flapping ;
t3 = T- Dt_flapping ;
t4 = T ;
for i = 1:length(t)
if t(i)>=0 && t(i)<= (t2+t3)/2
omega_star(i) = omega_star_0/(2a(t2-t1))log(cosh(a(t(i)-t1))/cosh(a*(t(i)-t2)))+omega_star_0/2 ;
end
if t(i) > (t2+t3)/2
omega_star(i) = -omega_star_0/(2a(t4-t3))log(cosh(a(t(i)-t3))/cosh(a*(t(i)-t4)))+omega_star_0/2 ;
end
end
Kindly help me in this regard.
Thank you in advance