I don’t know where to post this. So maybe here. Sorry if it’s not the right place, and please point me to where I can ask this kind of question.
So, anyway, I’m trying to learn to control dynamixel motr. And I know we can use velocity and acceleration profile to create trapezoidal profile. The infomation I get from the manual website of dynamixel. XM430-W350-T/R
- Which value should I set for velocity profile? For example I read in the datasheet that at 12V the velocity is 30 rev/min. As I understand that I should set the value of velocity profile to 132 (30 divided to 0.229 rev/min = 132). Is that correct?
- What about the acceleration profile? I see nothing mention in the datasheet so I don’t know what is the max acceleration for the motor. The datasheet say that, acceleration profile value will not exceed 50% of velocity. Does that mean I should set the acceleration value to 61 (50% of 132)?
- Time calculation for trapezoidal profile is t1 = 64 * (Velocity profile/Acceleration profile), t2 = 64 * delta_position / Velocity profile. What is the units and values using in here? Is that the real velocity value (30 rev/min) or the integer value set before(132). If so, wouldn’t t1 value would be in minute? same with acceleration? What about delta_position is that in integer value or rev value?
Thank you for your help.
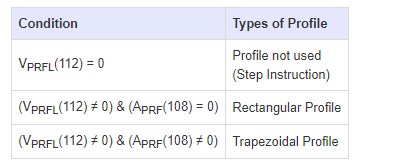
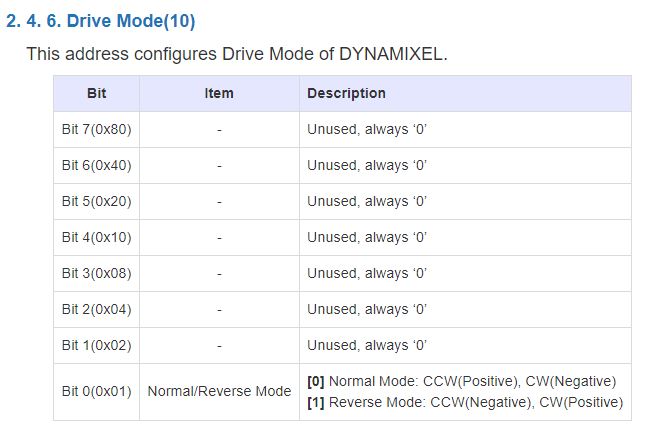 as shown here Bit 2 is unused. The Vpfrl and Aprf in the yaml file are not equal to 0. How can I switch the drive mode to velocity-based profile?
as shown here Bit 2 is unused. The Vpfrl and Aprf in the yaml file are not equal to 0. How can I switch the drive mode to velocity-based profile?