Here is my code
I use MX-28 protocol 1 model
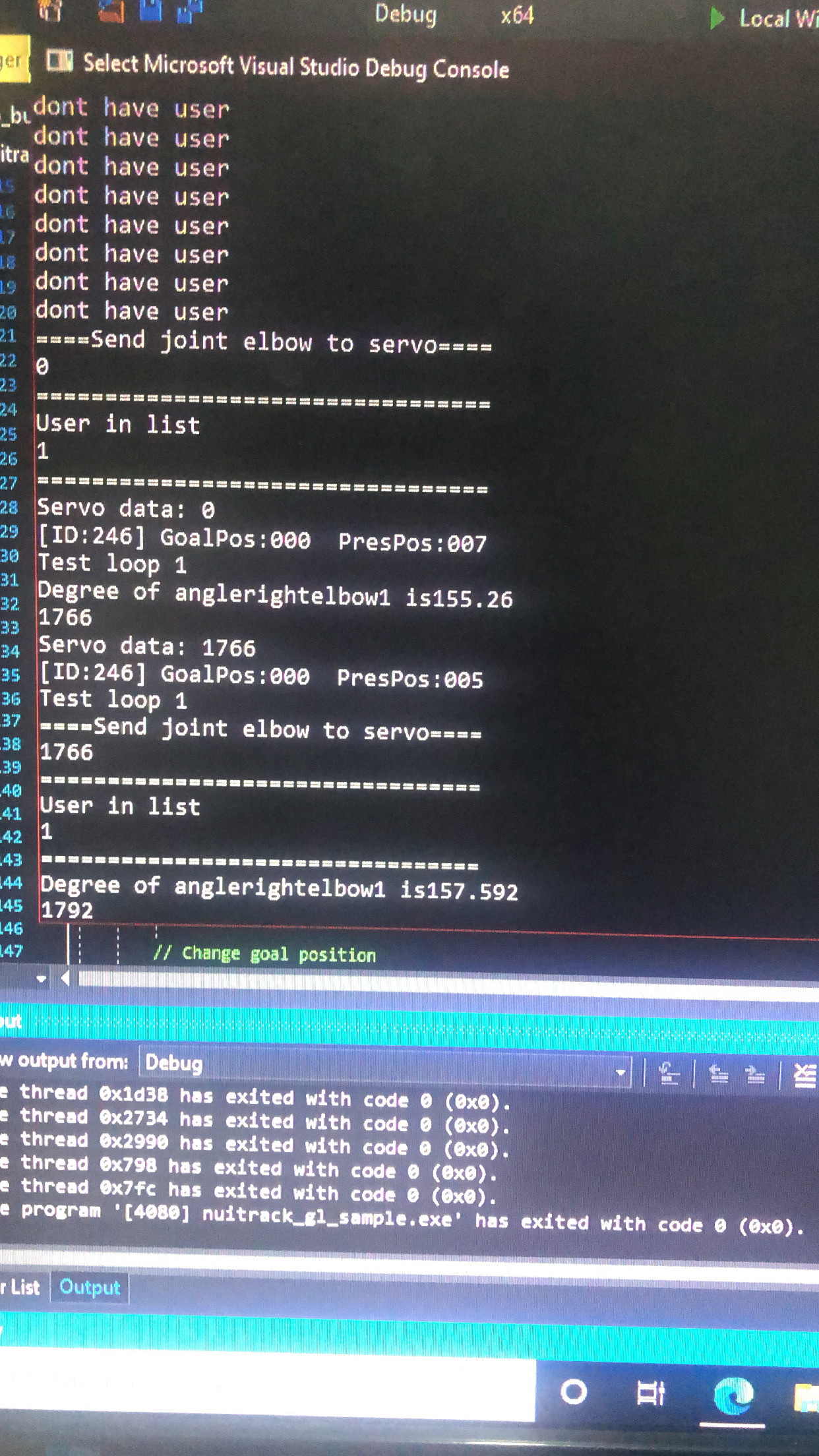
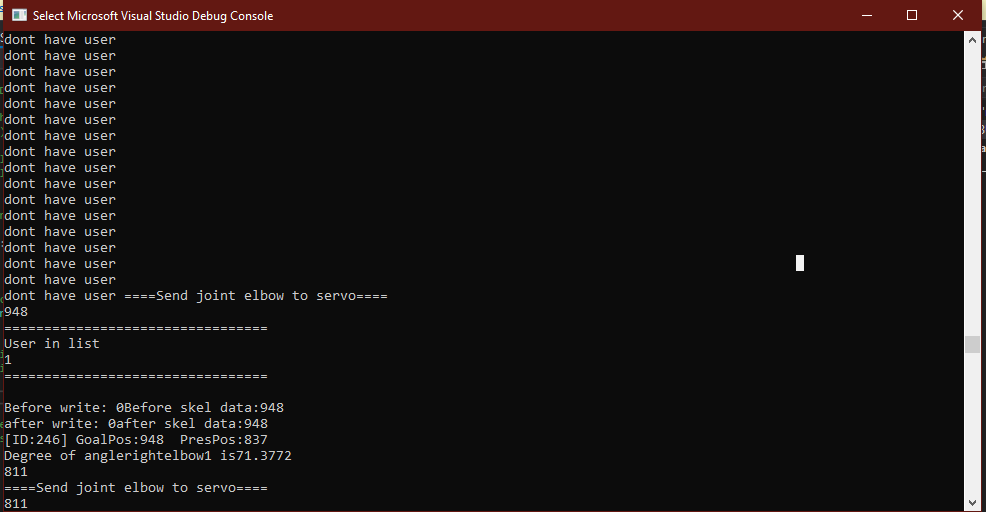
sample.getservo1() is my parameter to store int data (0-4095)
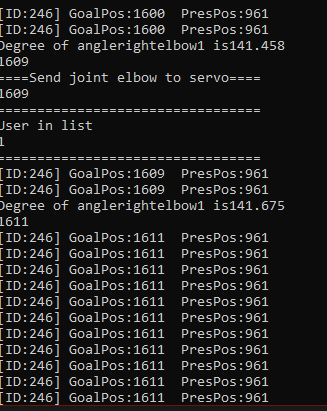
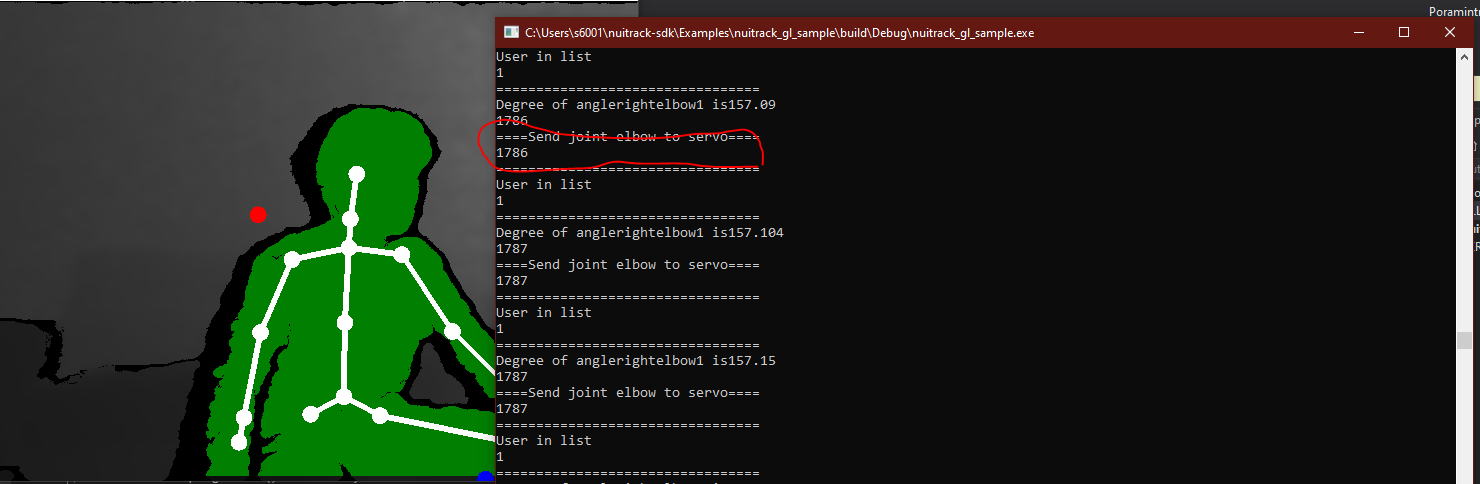
but servo cannot write goal position follow my parameter
Please can you solve this problem and I stuck this for a while
I am truely appreciate
int servotest()
{
#define ADDR_MX_TORQUE_ENABLE 24 // Control table address is different in Dynamixel model
#define ADDR_MX_GOAL_POSITION 30
#define ADDR_MX_PRESENT_POSITION 36
// Protocol version
#define PROTOCOL_VERSION 1.0 // See which protocol version is used in the Dynamixel
// Default setting
#define DXL_ID 246 // Dynamixel ID: 1
#define BAUDRATE 1000000
#define DEVICENAME “COM3” // Check which port is being used on your controller
// ex) Windows: “COM1” Linux: “/dev/ttyUSB0” Mac: “/dev/tty.usbserial-*”
#define TORQUE_ENABLE 1 // Value for enabling the torque
#define TORQUE_DISABLE 0 // Value for disabling the torque
#define DXL_MINIMUM_POSITION_VALUE 0
#define DXL_MAXIMUM_POSITION_VALUE 1100 // and this value (note that the Dynamixel would not move when the position value is out of movable range. Check e-manual about the range of the Dynamixel you use.)
#define DXL_MOVING_STATUS_THRESHOLD 10 // Dynamixel moving status threshold
dynamixel::PortHandler *portHandler = dynamixel::PortHandler::getPortHandler(DEVICENAME);
// Initialize PacketHandler instance
// Set the protocol version
// Get methods and members of Protocol1PacketHandler or Protocol2PacketHandler
dynamixel::PacketHandler *packetHandler = dynamixel::PacketHandler::getPacketHandler(PROTOCOL_VERSION);
int index;
int dxl_comm_result = COMM_TX_FAIL; // Communication result
int dxl_goal_position = sample.getservo1(); // Goal position
uint8_t dxl_error = 0; // Dynamixel error
uint16_t dxl_present_position = 0; // Present position
if (user_number == 0)
{
std::cout << "dont have user " << std::endl;
//return 0;
}
else {
std::cout << "robot and start connect" << std::endl;
}
// Open port
if (portHandler->openPort())
{
printf("Succeeded to open the port!\n");
}
else
{
printf("Failed to open the port!\n");
printf("Press any key to terminate...\n");
getch();
}
// Set port baudrate
if (portHandler->setBaudRate(BAUDRATE))
{
printf("Succeeded to change the baudrate!\n");
}
else
{
printf("Failed to change the baudrate!\n");
printf("Press any key to terminate...\n");
getch();
}
// Enable Dynamixel Torque
dxl_comm_result = packetHandler->write2ByteTxRx(portHandler, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_ENABLE, &dxl_error);
if (dxl_comm_result != COMM_SUCCESS)
{
printf("%s\n", packetHandler->getTxRxResult(dxl_comm_result));
}
else if (dxl_error != 0)
{
printf("%s\n", packetHandler->getRxPacketError(dxl_error));
}
else
{
printf("Dynamixel has been successfully connected \n");
}
while (1)
{
if (user_number == 0)
{
std::cout << "dont have user " << std::endl;
//return 0;
}
else {
// Write goal position
dxl_comm_result = packetHandler->write2ByteTxRx(portHandler, DXL_ID, ADDR_MX_GOAL_POSITION, dxl_goal_position, &dxl_error);
//std::cout << "Servo data: " << sample.getservo1() << std::endl;
if (dxl_comm_result != COMM_SUCCESS)
{
printf("%s\n", packetHandler->getTxRxResult(dxl_comm_result));
}
else if (dxl_error != 0)
{
printf("%s\n", packetHandler->getRxPacketError(dxl_error));
}
do
{
// Read present position
dxl_comm_result = packetHandler->read2ByteTxRx(portHandler, DXL_ID, ADDR_MX_PRESENT_POSITION, &dxl_present_position, &dxl_error);
if (dxl_comm_result != COMM_SUCCESS)
{
printf("%s\n", packetHandler->getTxRxResult(dxl_comm_result));
}
else if (dxl_error != 0)
{
printf("%s\n", packetHandler->getRxPacketError(dxl_error));
}
std::cout << "Servo data: " << sample.getservo1() << std::endl;
printf("[ID:%03d] GoalPos:%03d PresPos:%03d\n", DXL_ID, dxl_goal_position, dxl_present_position);
} while ((abs(dxl_goal_position - dxl_present_position) > DXL_MOVING_STATUS_THRESHOLD));
std::cout << "Test loop " << user_number << std::endl;
}
}
// Disable Dynamixel Torque
dxl_comm_result = packetHandler->write1ByteTxRx(portHandler, DXL_ID, ADDR_MX_TORQUE_ENABLE, TORQUE_DISABLE, &dxl_error);
if (dxl_comm_result != COMM_SUCCESS)
{
printf("%s\n", packetHandler->getTxRxResult(dxl_comm_result));
}
else if (dxl_error != 0)
{
printf("%s\n", packetHandler->getRxPacketError(dxl_error));
}
// Close port
portHandler->closePort();
return 1;
}