I would like to start my own object with arduino and DynamixelWorkbench.
And I want to control AX-12As by one function,I noticed the sync function. I want to know if I can use syncWrite to realize that?
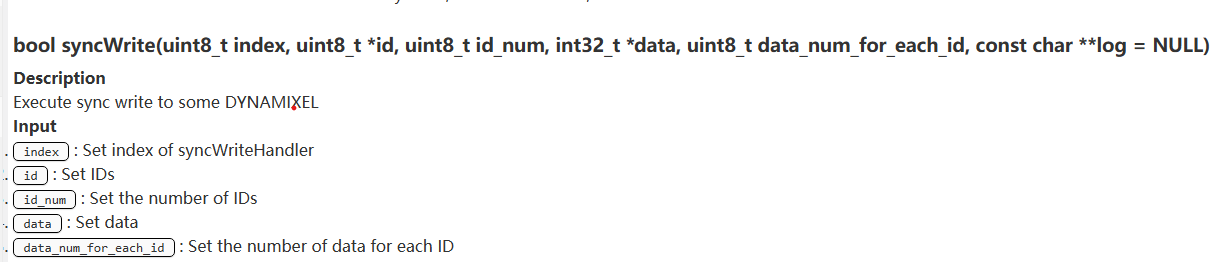
Just like the picture, “IDs” if mean I can write many sevro’s ID?
The best situation is post a short example.
thanks you wholehertly!
The DYNAMIXEL Workbench library is primarily designed for operation of DYNAMIXEL servos in ROS. If you don’t need to operate your DYNAMIXELs using ROS I would instead recommend the DYNAMIXEL2Arduino library.
The DYNAMIXEL2Arduino library features sync and bulk write commands inherited from the DYNAMIXEL SDK, as well as an example program showing sync in use.
If you would prefer to use the DYNAMIXEL Workbench, the example programs written for the OpenCR should be able to provide you the information you need to proceed with that path.
Okay, thanks for your reply sir. And I want to ask you a question. When ax-12a is working on wheelMode, why double ax-12a have different position, when they are work about Ten Turns or more? Pre-condition is they start at same position and speed. If differnet load on differnet sevro have differnet position?
Thank you!
It looks like that you want “multi-turn position control” more than just plain velocity control so you may need to use the XL-430 servos instead.
1 Like
In wheel mode, the AX-12s don’t monitor their positions at all during movement. This means that it’s very likely that 2 AX-12s in wheel mode won’t turn the exact same amount when running since physical differences between the motor components, as well as small differences in experienced load will affect the rate of rotation.
As roboteer suggested, if you require precise positioning with multiple turns of rotation then you should consider upgrading to our XL series servos to use Extended Position Control mode.
Sir,thanks for your reply.