Issue:
I am working on a humanoid robot walking gait project using MX-28 servos (Protocol 2.0) and an OpenCM9.04 controller. I encountered an issue after upgrading the firmware of the MX-28 servos from Protocol 1.0 to Protocol 2.0.
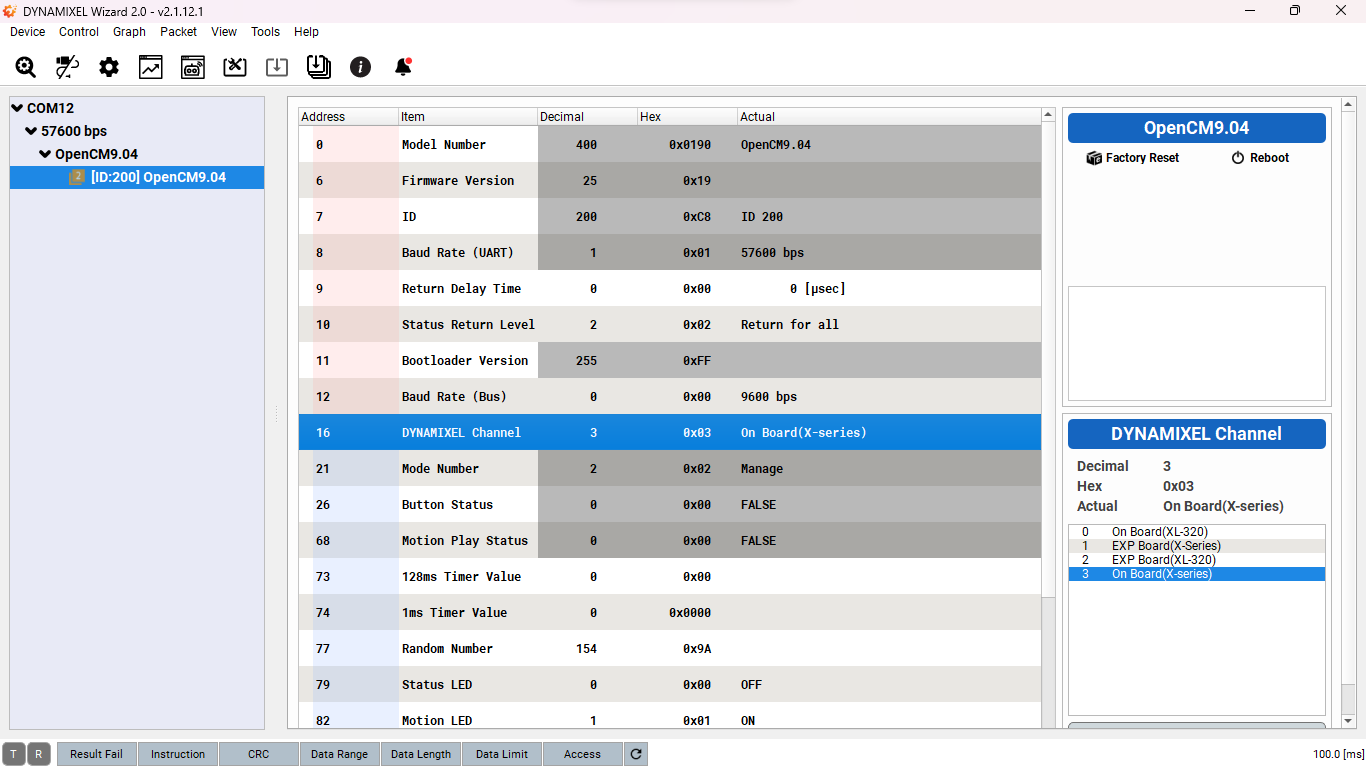
When I download the task program (using R+ Task 2.0 or R+ Task 3.0) to the robot, the robot does not move as programmed or respond at all when powered on. However, the hardware check through Dynamixel Wizard 2.0 shows no issues, and all servos are accessible.
Interestingly, if I use the MX-28 servos with Protocol 1.0 and a CM700 controller, the task program (R+ Task 2.0) executes correctly, and the robot functions as expected.
The problem is that I need the MX-28 servos to use Protocol 2.0 to work with the OpenCM9.04 controller, which requires Protocol 2.0. Is there a solution to resolve this issue or any steps I might have missed to ensure compatibility?
Additionally, I have the following questions:
- Could the issue with the task program not executing be caused by the MX-28 servos using Protocol 2.0?
- Is the MX-28 with Protocol 2.0 compatible with the OpenCM9.04 controller using Protocol 2.0?
- My MX-28 servos were purchased around 6 years ago. Are these older servos compatible with Protocol 2.0 after a firmware upgrade?
DYNAMIXEL Servo:
- MX-28 (Firmware updated to Protocol 2.0)
DYNAMIXEL Controller:
- OpenCM9.04 (custom made board)
- CM700 (for testing Protocol 1.0 compatibility)
Software Interface:
- R+ Task 2.0
- R+ Task 3.0
- R+ Motion 2.0
- Robo Plus (only for testing motion servos with Protocol 1.0)
- Dynamixel Wizard 2.0