Use the following template to help create your post:
- What model of TurtleBot3 are you using?
waffle_pi
- Describe your control environment. This includes the PC you are using to control TurtleBot3 (operating system & version) and any power source.
Ubuntu 16.4.7
- Describe any modifications or third-party hardware in use.
None
- Include pictures if possible.



- Include a full description of the issue.
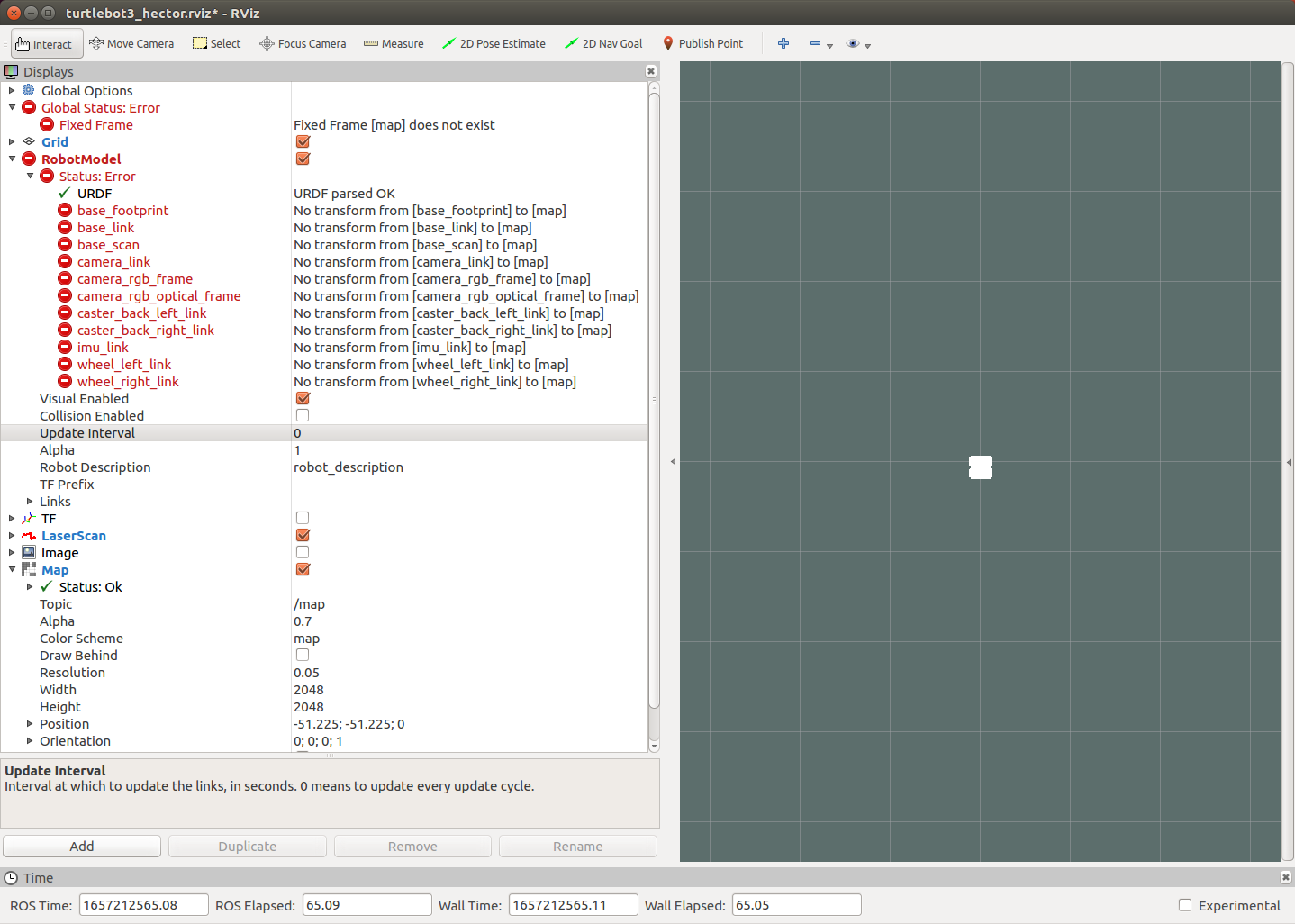
I recently purchased the Turtlebot3 Waffle Pi and followed the steps outlined in the Quick Start Guide and through section 4.1 of the SLAM section of the Turtlebot3 ROBOTIS E-Manuel (TurtleBot3). However, I’ve run into an issue with SLAM… it gives me a warning stating “no map received” (there is a photo below) and the robot does not register its surroundings with the LIDAR.
I’ve attempted running three other SLAM methods, including Hector, Karto and Frontier Exploration and the corresponding photos are included below. I can remote navigate the robot and attempted to with all four methods to no avail.
I’m running ROS Kinetic on Ubuntu16.4.7.
Please let me know if you need any more information, but any help at all would be greatly appreciated.
Thank you