Hi all.
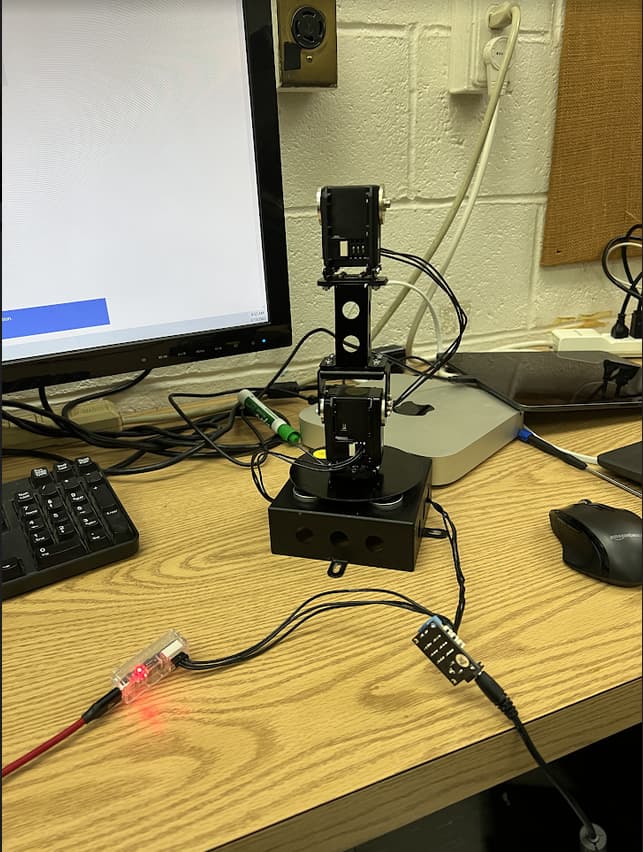
I was trying to configure the controller for a robotic arm using MX-106 and MX-64 motors, using the dynamixel_workbench package in ROS-Melodic. I tested with 3 motors (MX-106 inside the base)
The interface to communicate with the motors is a U2D2.

I downloaded the dynamixel_workbench package, and followed the tutorials:
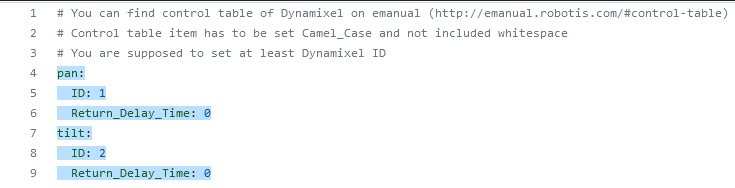
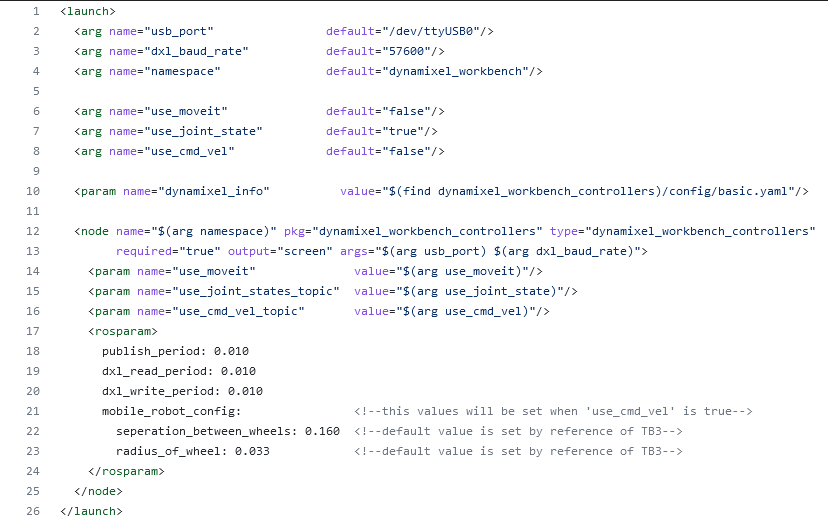
After confirming the IDs and the baud rate to communicate with the motors, I configured the basic.yaml and launch files
After running, the motors seemed to be found, but the communication was not established (sorry, I don’t have a picture of the error). But then, the motors couldn’t be found anymore, not even with the wizard (testing all protocols, all baud rates).
I tried to recover the firmware, but I reach a point where the assistant asks to turn off and turn on the motor, but when I do that, the assistant does not detect it.
When I connect the power to the motors, I can see the LEDs blinking, as they do normally.
Does anyone know how to fix this issue? How can I fix the motors and make them findable again?
Thanks for your help!