Use the following template to help create your post:
-
State the model of servo you are using.
MX-64 -
Add (or create) Tags to your post with the specific model of your product.
-
Describe your control environment. This includes the controller or interface, computer and OS, and any power source you are using
I am using windows, Labview, Dyanmxiel SDK, protocol 2.0 Labview block.
usb latency time is 1ms -
Specify the operating mode you are using, for applicable models.
PWM mode -
Specify and link any manuals or resources you have used related to your inquiry.
-
Include pictures if possible. This can help our members see how wires are connected, how hardware is installed, or to identify other possible issues.
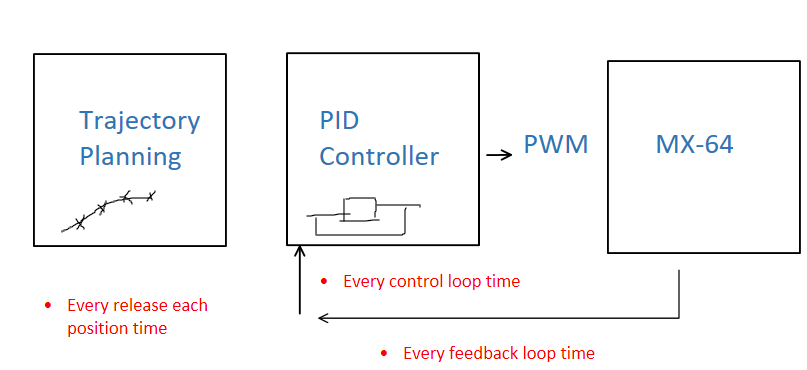
I am try to use my own joint trajectory planner + pid controller to replace the dynamixel control algorithm.
there are some confusion points during time setting.
**how could I set the each release trajectory points gap time, **
according to the feedback loop time, and control loop time?
how does the dyanmxiel setting?
thanks a lot!