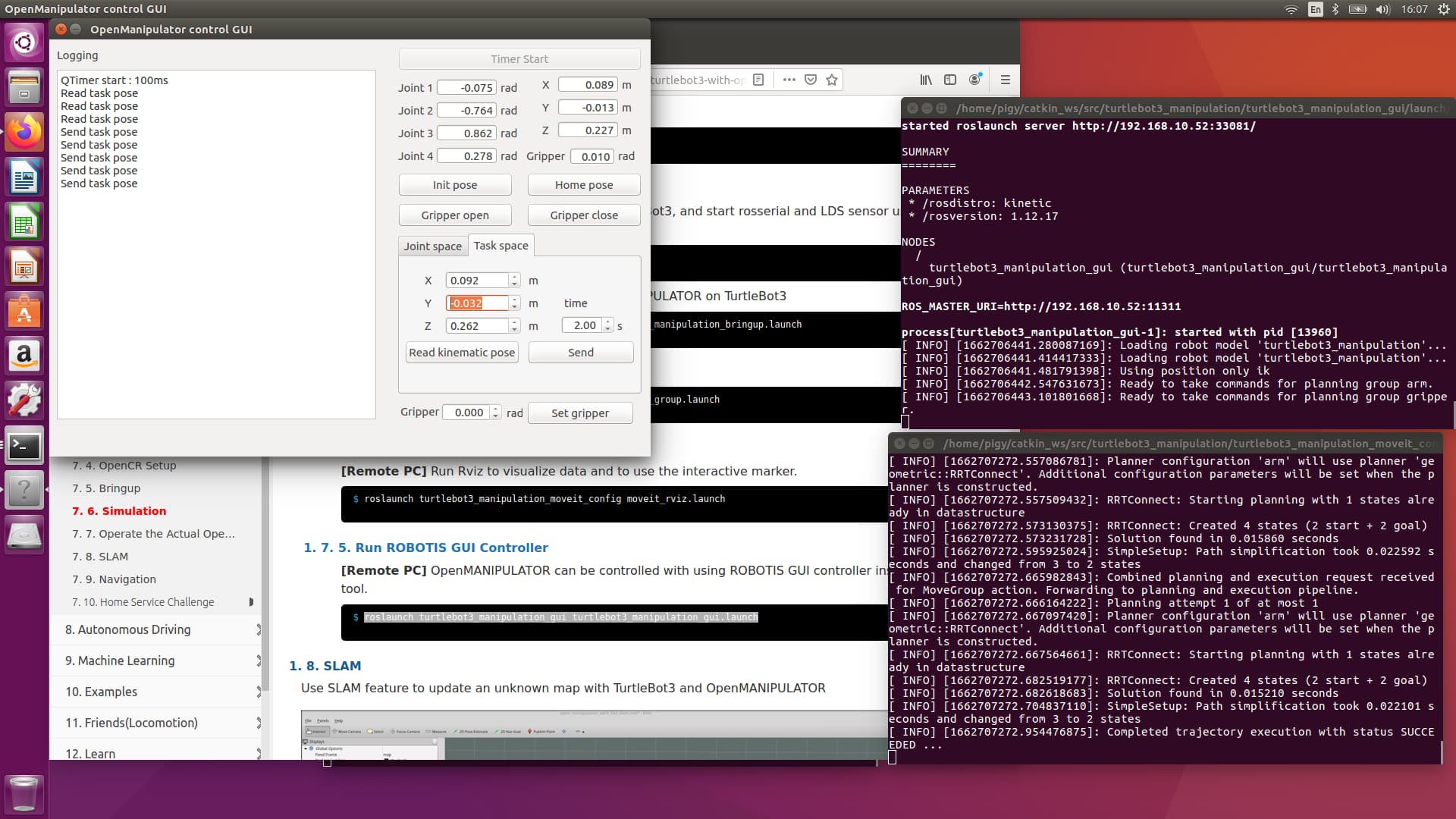
If I run the openmanipulator with tb3 on kinetic, the window opens normally without error, but the y-axis does not move.
I entered xyz value as gui. It moved normally when the x and z values were entered, but it did not move when the y values were entered. No errors were reported. I configured the manipulator as xl430w250. I set id and baud rate with dynamic wizard. I tried putting firmware several times, but only the id11 motor didn’t work.
Hi,
Is the torque of the ID 11 (Yaw) DYNAMIXEL successfully on?
TurtleBot3 Manipulation package is designed for the OpenMANIPULATOR-X which comes with XM430.
In order to use the XL430 that does not support the Current based Position Control mode, you should modify the source code so that the gripper can be configured and operated as Position Control mode.