-
What model of servo are you using?
Dynamixel XM430-W350 (OpenManipulator-X) -
Describe your control environment. This includes the controller or interface, and any power source.
Turtlebot3 with an OpenManipulator mounted on the top layer. One 11.1V LiPo battery is powering a Raspberry Pi and OpenCR board. The OpenManipulator and the TurtleBot’s two wheels are connected to the OpenCR board. -
Specify the operating mode for applicable models, and any firmware settings you are using.
OpenCR firmware has been configured for the model “om_with_tb3”. -
Include pictures if possible.
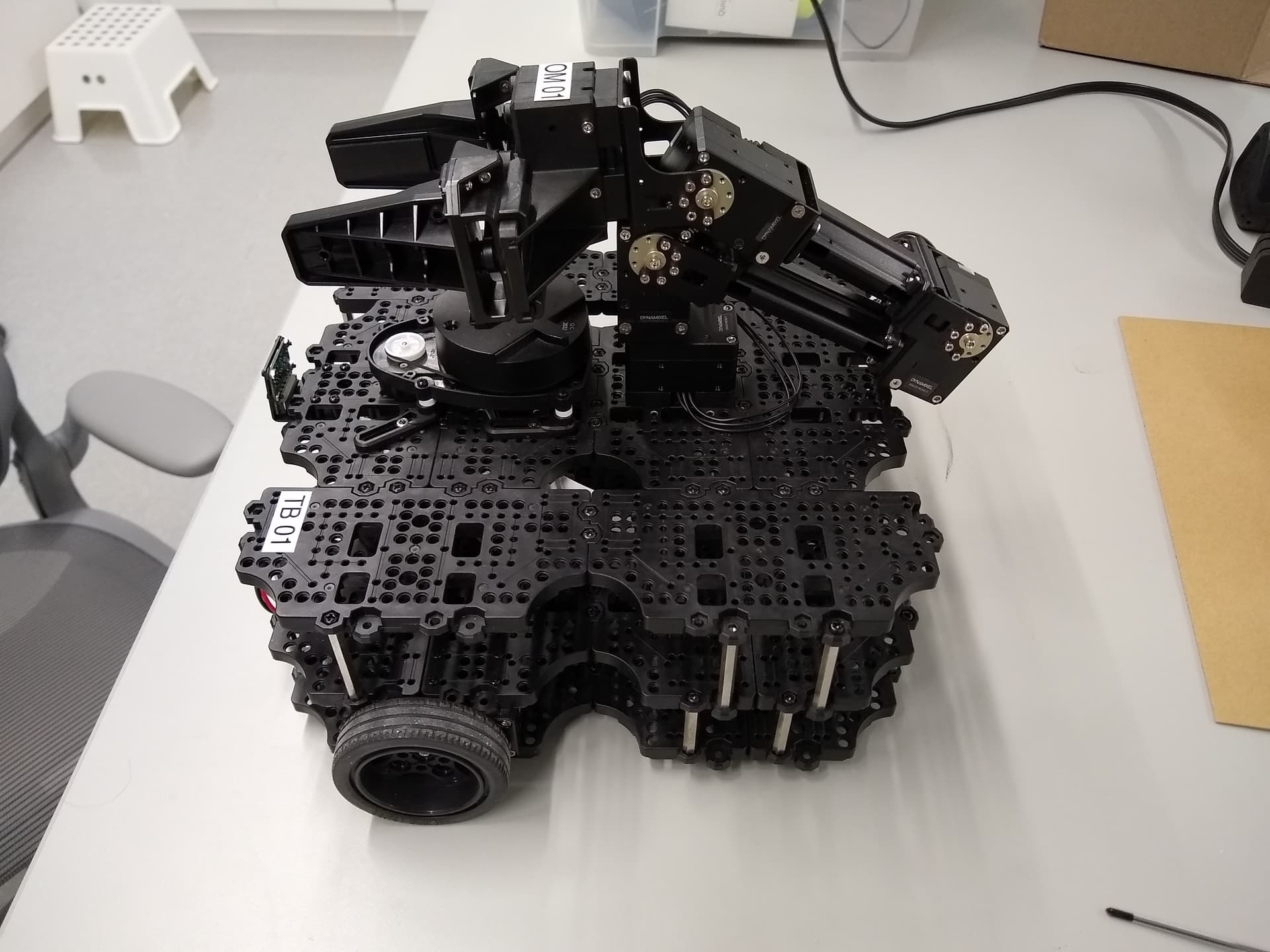
-
Include a full description of the issue.
I’m working with an OpenManipulator arm connected to a TurtleBot3, but there’s a strange issue I’m running in to when I try to use MoveIt to control the manipulator. Whenever I send a request to execute a planned trajectory, themove_groupnode immediately displays the following, even when the manipulator is still moving:
Controller arm_controller successfully finishedCompleted trajectory execution with status SUCCEEDED ...
When I used the Turtlebot3 w/ OpenManipulator in Gazebo, the move_group node would block until the manipulator had finished moving, so the timing is causing issues when I test my algorithm with a physical arm. Since everything was working fine in Gazebo, I am assuming that there is some hardware setting that I have configured incorrectly. Does anyone have a clue as to what might be going on?