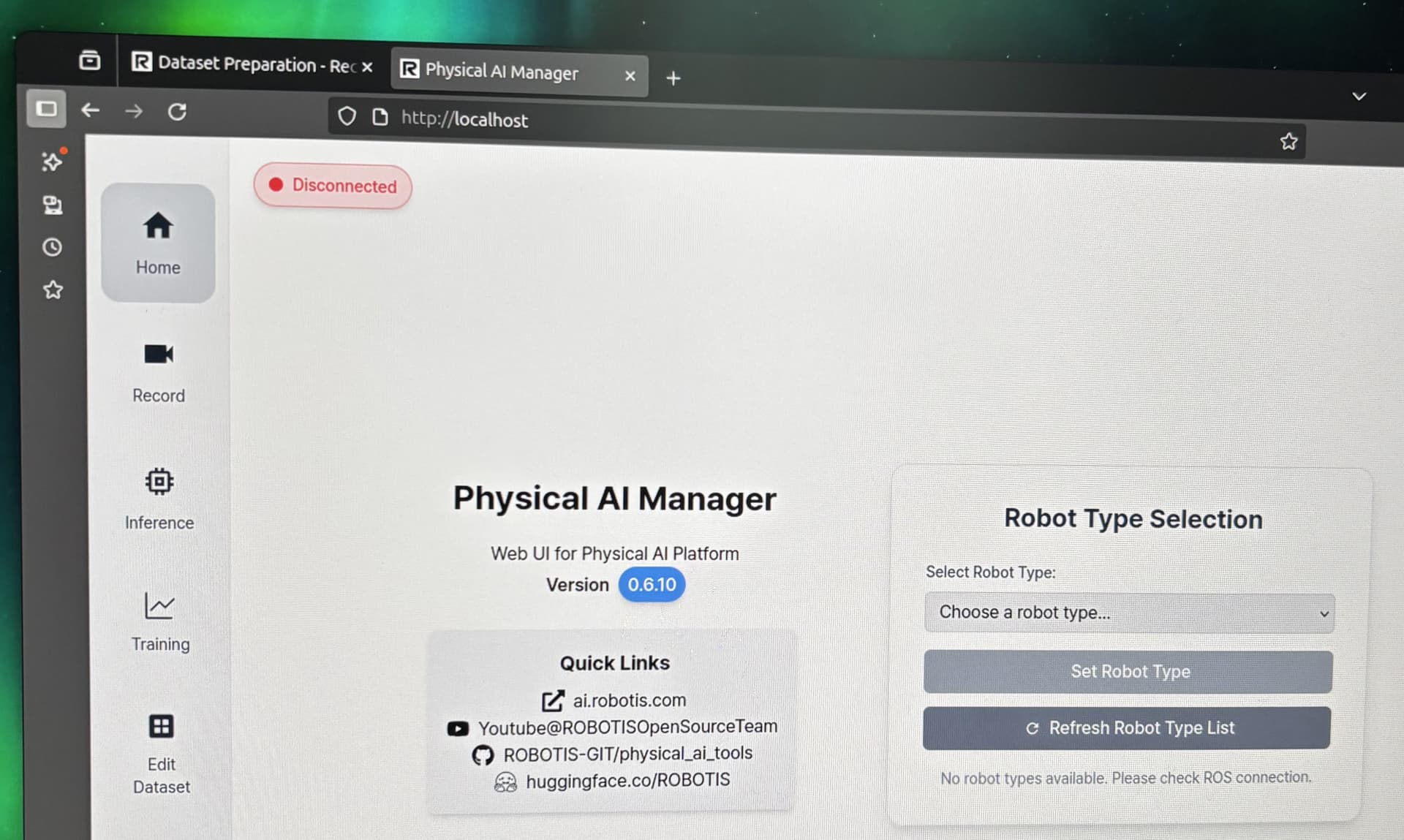
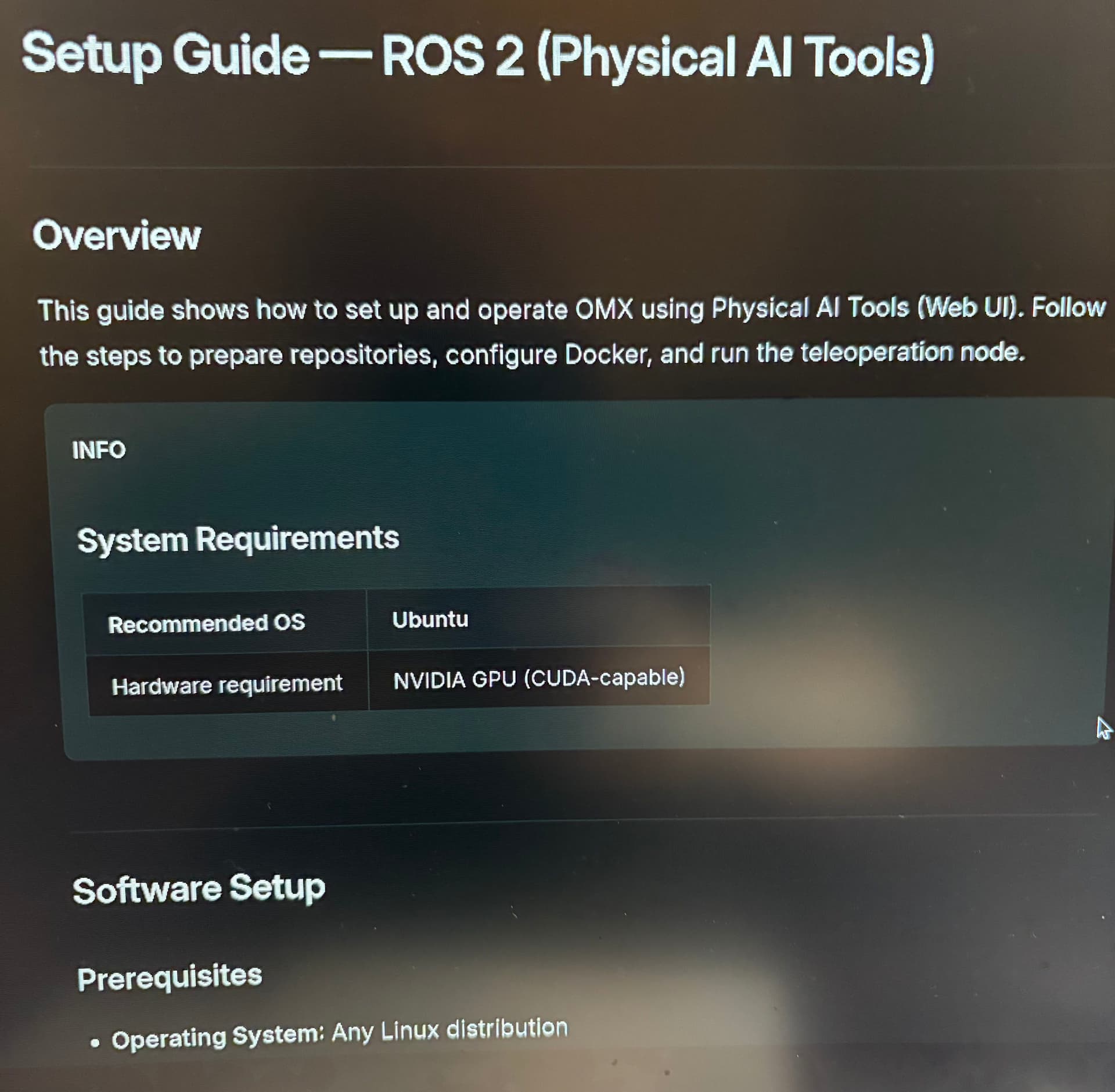
Since the recent ROBOTIS announcement of the OMX, I was reading up on the Setting Up of the OMX at its web link:
Right now the “official” setup is using a PC running on Ubuntu 24.04, but “at first look”, I did not see any constraint “against” using OMX with SBCs such as RPi5 or Orin Nano, instead. Furthermore, at present, I only have the needed critical components (XL-330s, XL-430s and OpenRB-150s) and not the actual frame parts for the OMX. Thus, I realized that, for now, I can build a compact test rig that can be a simplified physical model of the OMX that I can use to test to see if the OMX tool chain created by ROBOTIS for the OMX can be applied to an RPi5 or an Orin Nano.
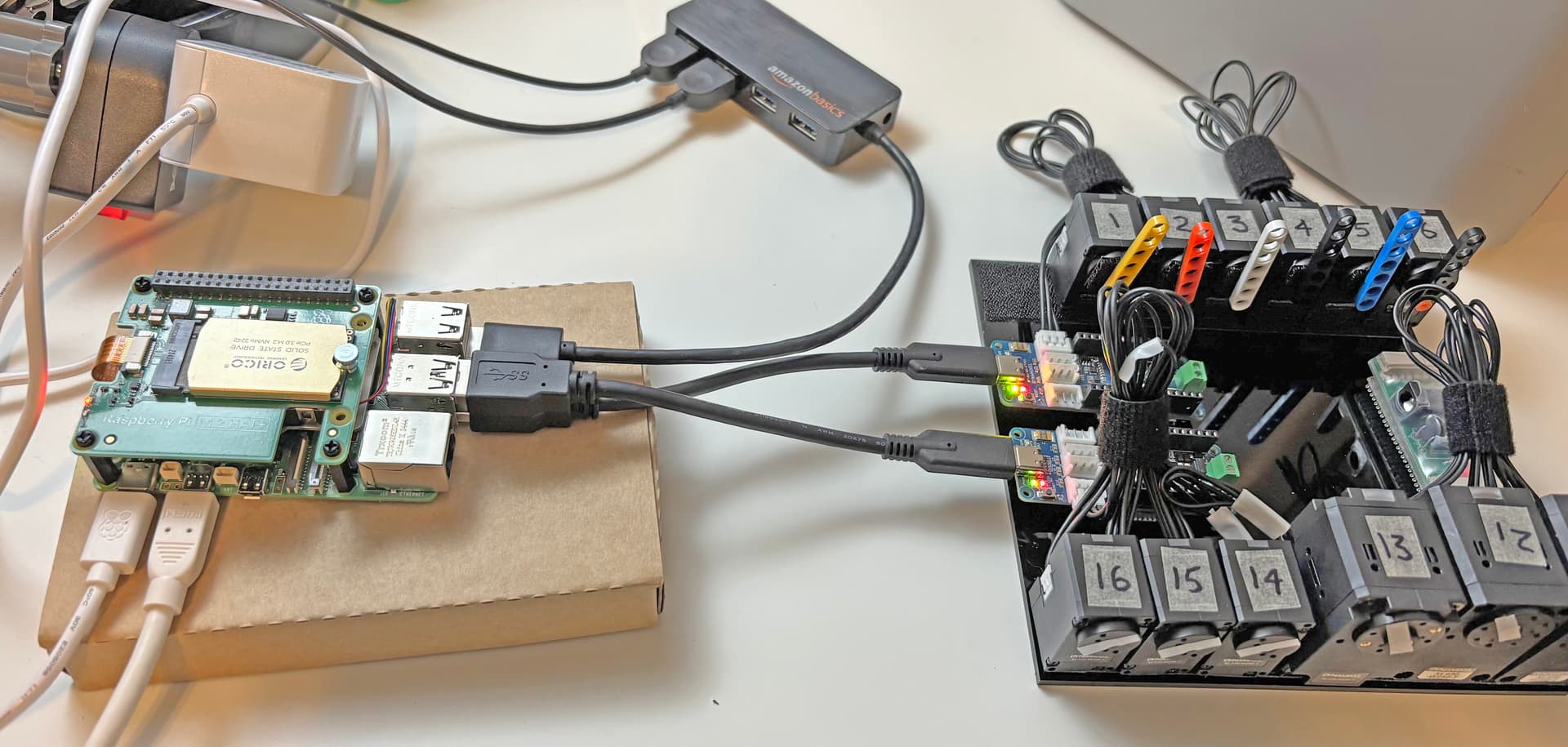
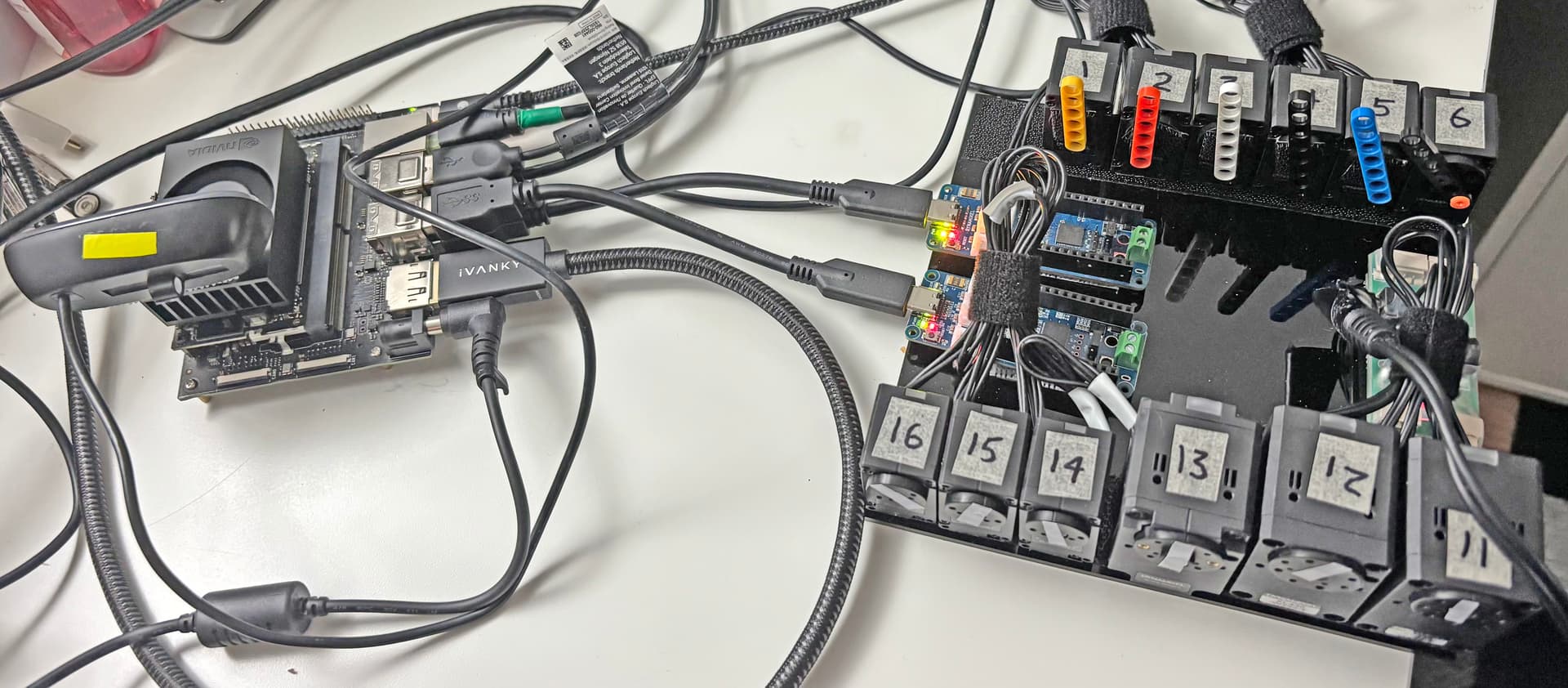
The proposed OMX test rig is shown below as a top view:
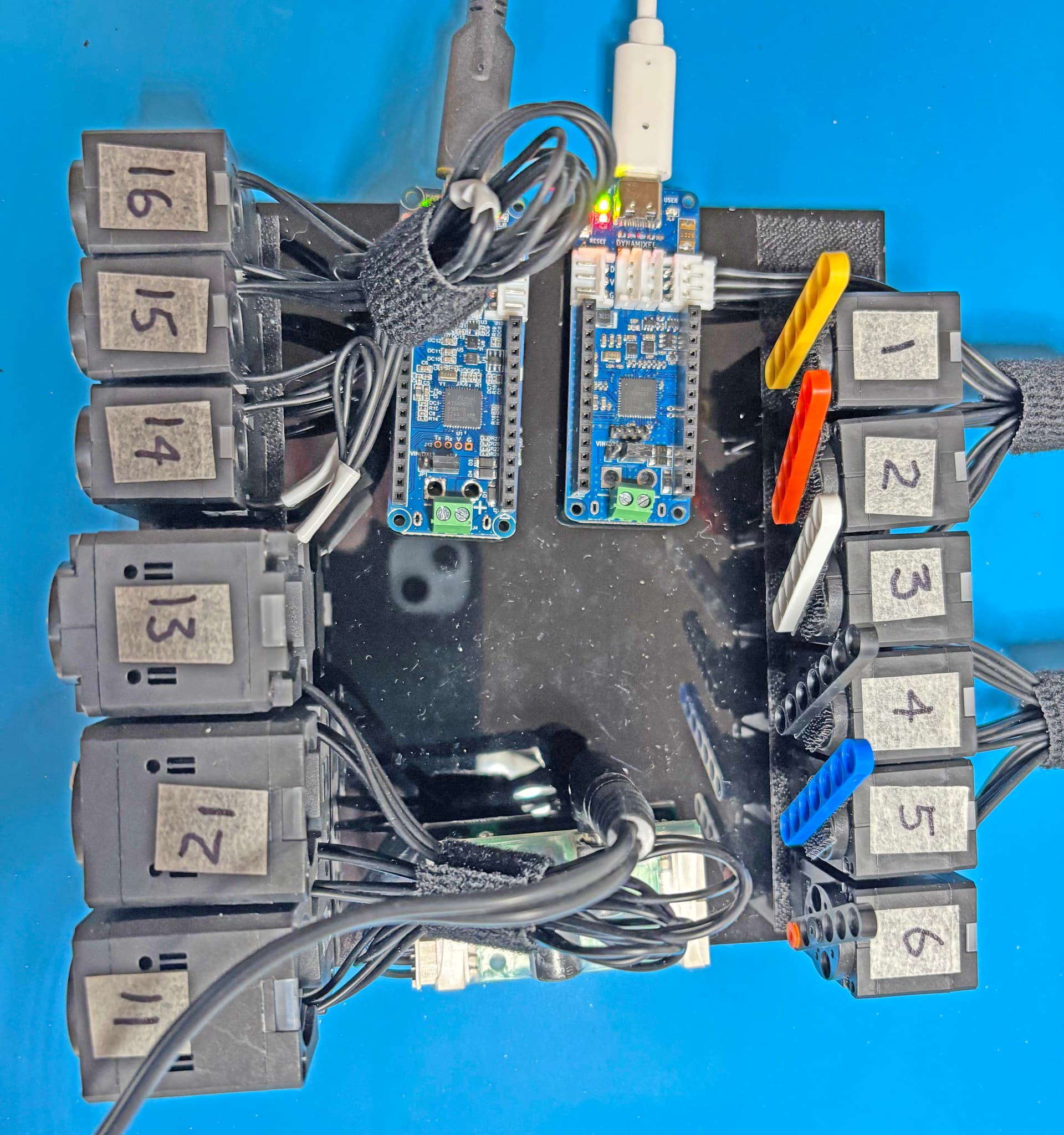
- The Leader-RB150 (on the right in this picture) is set up to use USB Power and has the Arduino sketch “usb_to_dynamixel.ino” uploaded to it so that it can pass-thru DXL packets to the 6 XL-330-M077s (operating at 5V) that I used for the Leader Pseudo-Arm. The OMX officially uses XL-330-M288s but I do not have enough of the M288s for the Leader Arm, so we’ll see if this switch-out will mess me up later with the software tool chain or not.
- The Follower-RB150 (on the left in this picture) is also set up to use USB Power and the Arduino sketch “usb_to_dynamixel.ino” also. Please note that the 3 XL-330s (ID=14, 15, 16) are connected right into the Follower-RB-150, so they are powered at 5V and controlled directly by this RB-150. However, the XL-430s are powered at 12 V via an SMPS2Dynamixel module (see more details in the picture below)
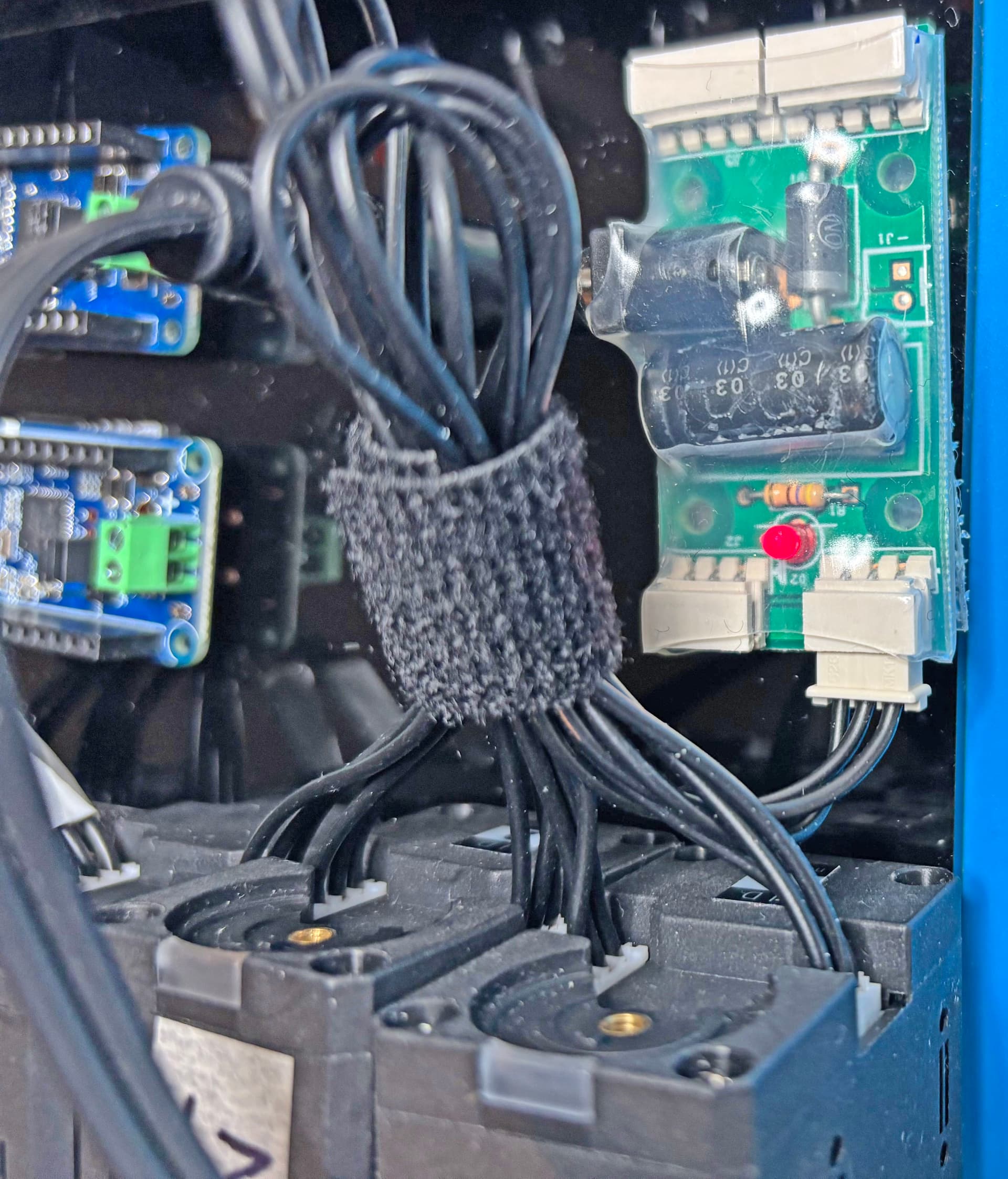
So how did I prevent the 12V PS from “frying out” the XL-330s and RB150?
In the following picture, the connection between the XL-430 group (ID=13) and the XL-330 group (ID=14) is made using a “special” X3P cable that has its VDD wire cut-off (labeled with some white electrical tape), thus the 5V circuit (RB-150 & XL-330) and 12 V circuit (SMPS2Dynamixel & XL-430) are isolated from each other.
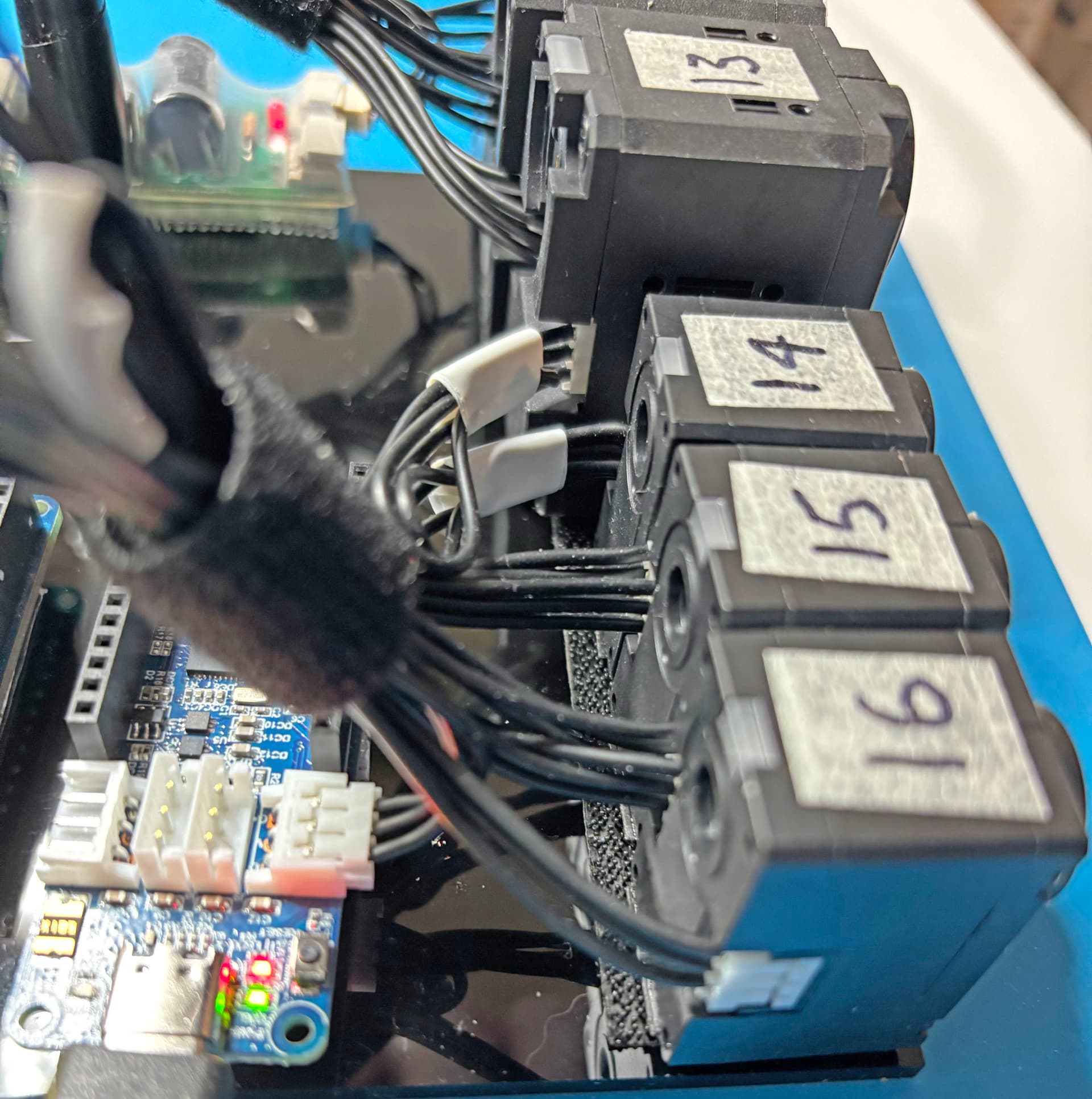
However, because the DATA Line of this special X3P cable is still intact, the Follower-RB150 can “see and control” both groups of servos of the Follower arm.
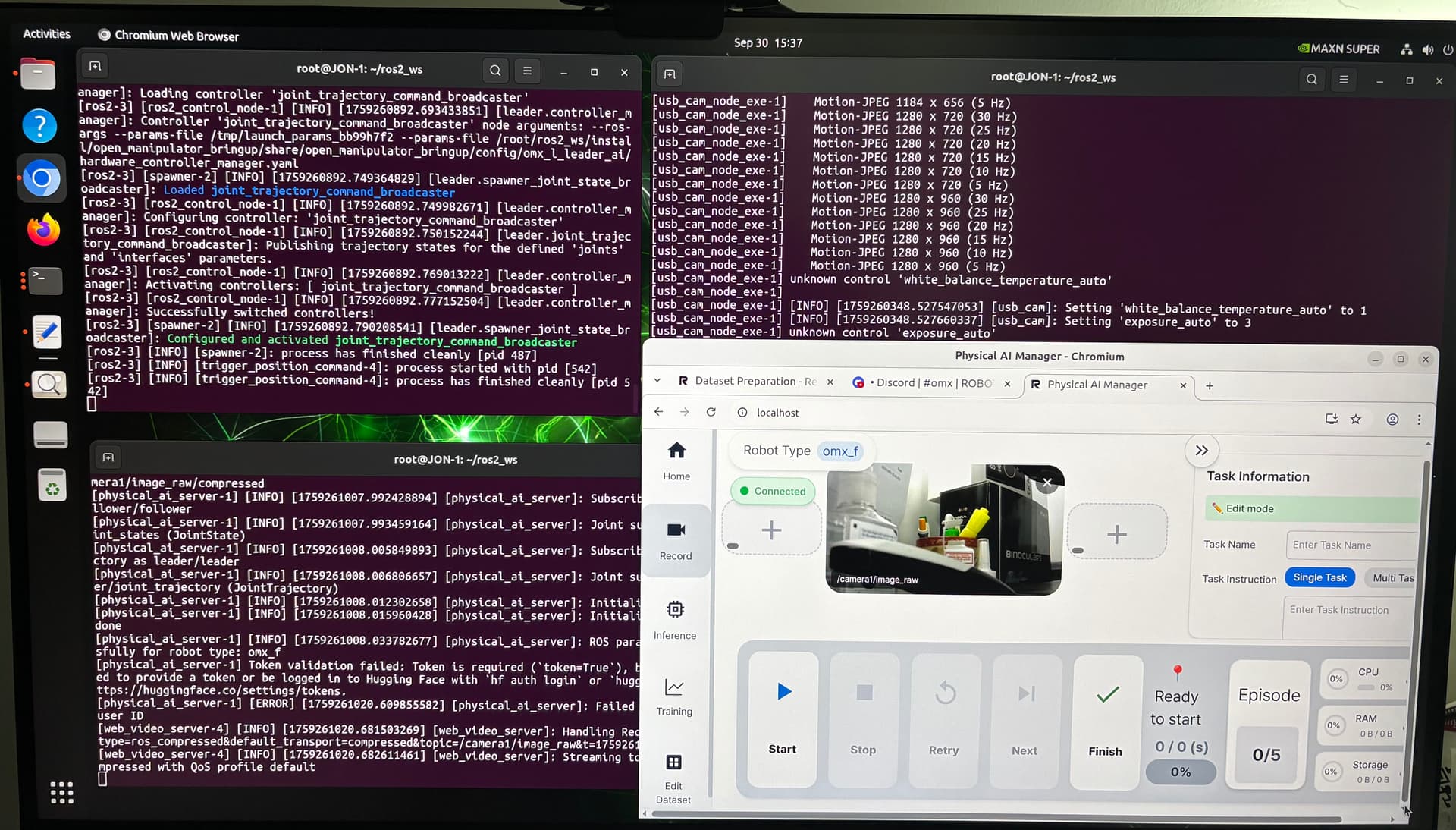
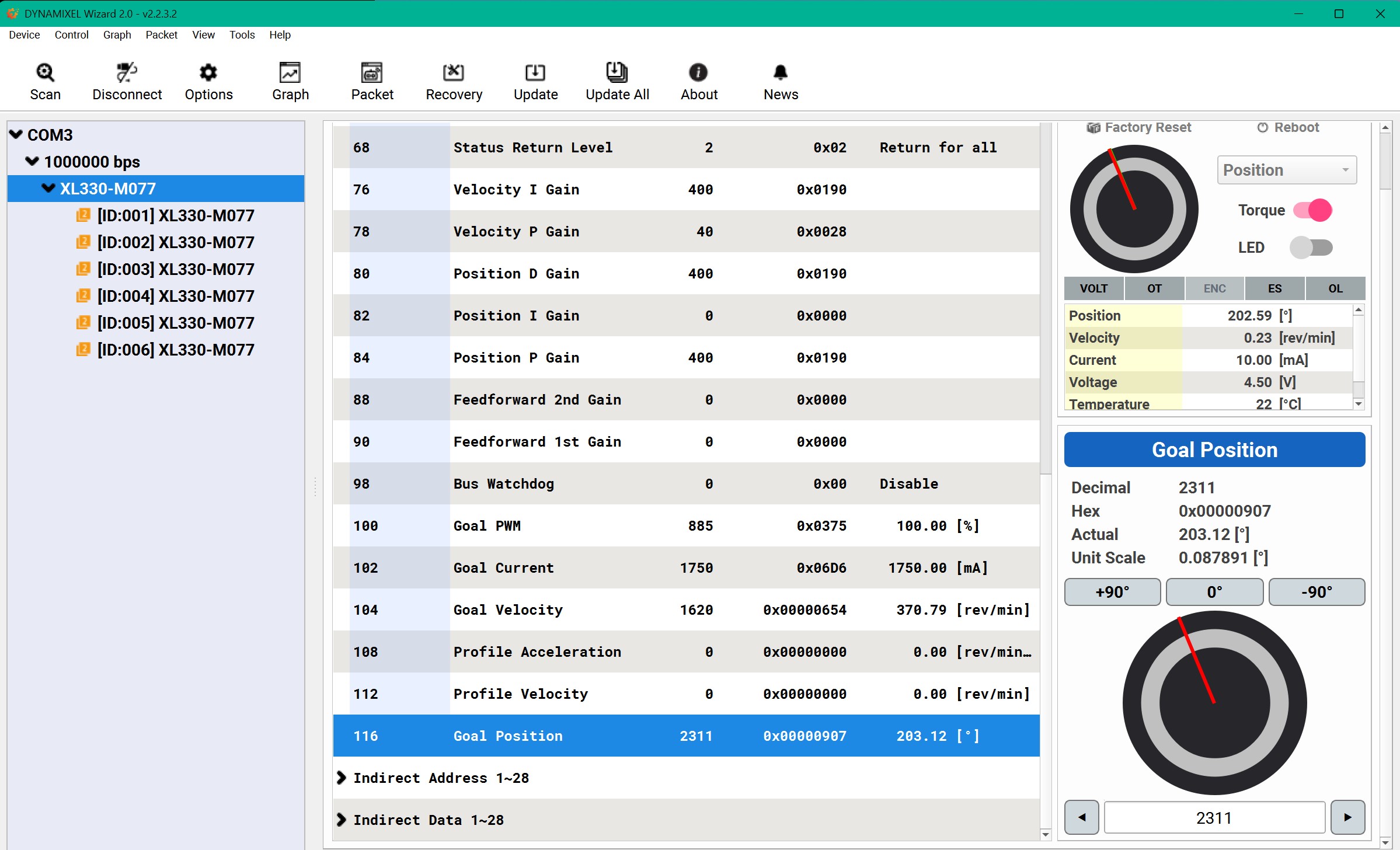
Using DXL-Wizard 2 tool to connect to the Leader-RB150 shows that the control of the 6 XL-330s is as it should be:
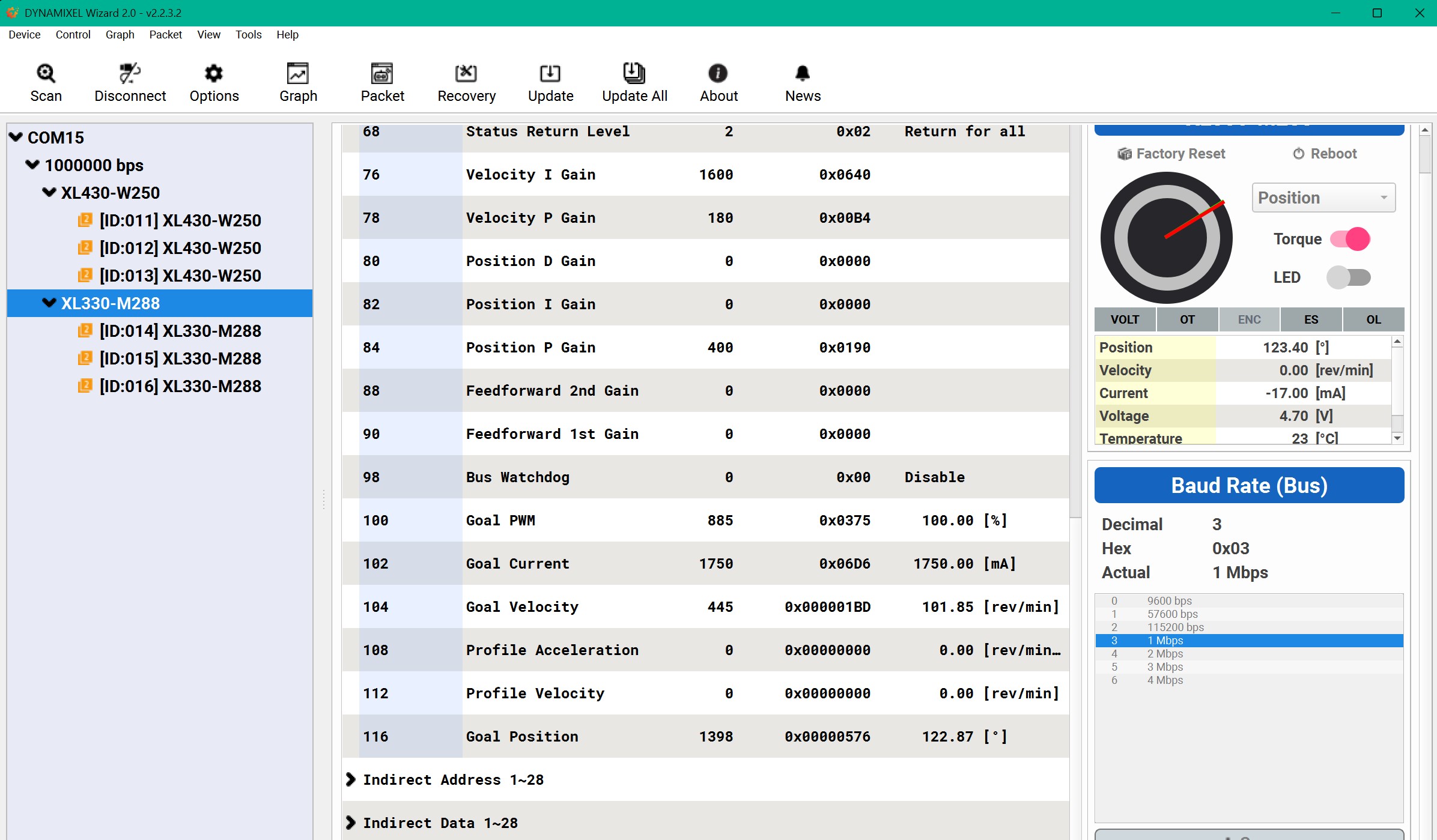
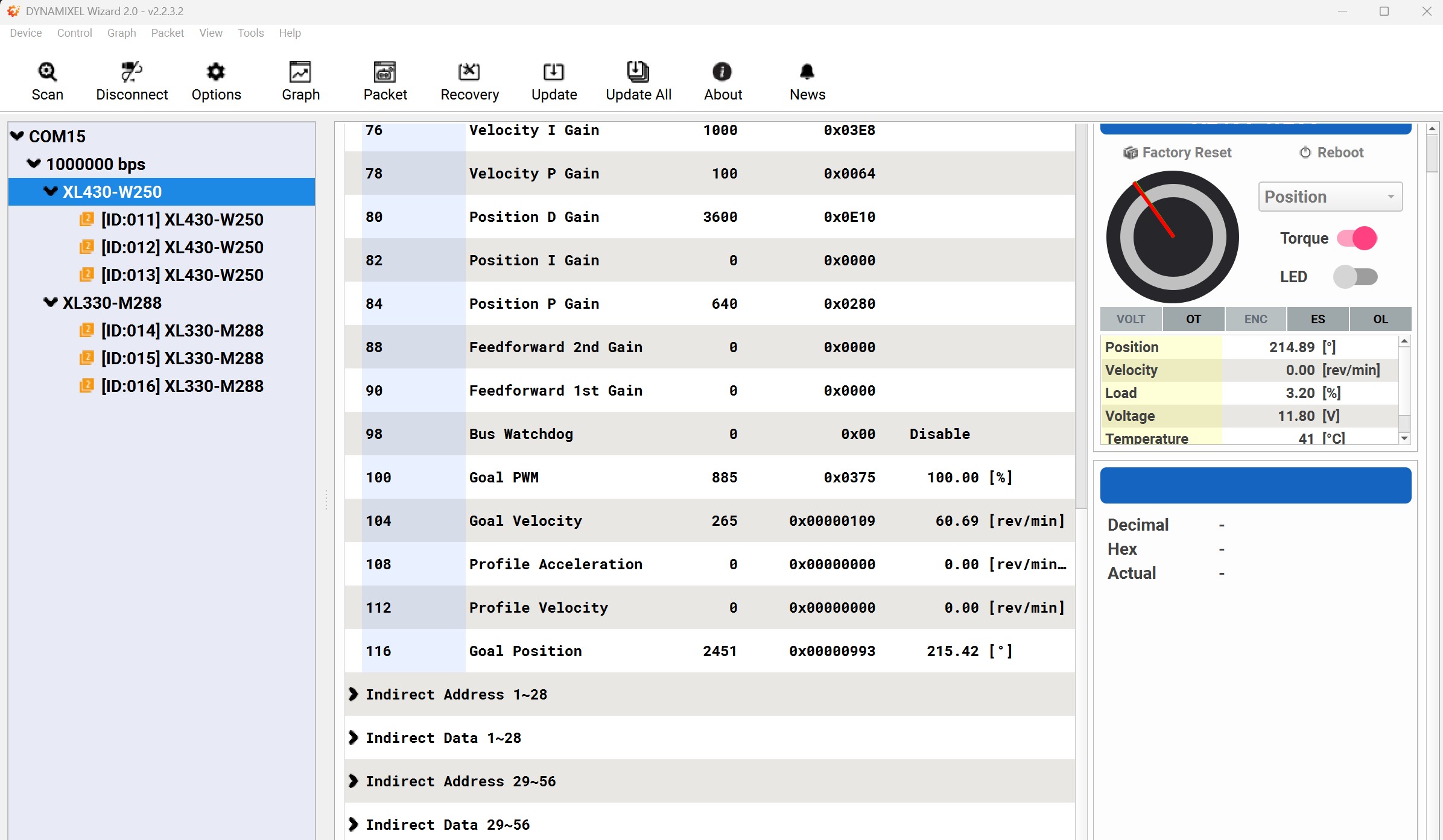
While DXL-Wizard 2 groups the XL-330s and XL-430s separately (because they have different Control Tables anyway)
So the OS Testing Rig is working out good, and I also recently have my RPi5 on Ubuntu 24.04 ready at this post:
So in the next post, I will report about my success or failure in implementing the ROBOTIS OMX tool chain to an RPi5 set up on Ubuntu 24.04, along with this OMX Test Rig.
So wish me LUCK!