Hi everyone,
Situation
Ubuntu 22.04 Ros2 Humble
U2D2
DynamixelSDK
Axe 3 et Axe 4 XC 430W240T
Gripper XL430-W250T
Robotic arm
i builded a robotic arm with 5 DOF.
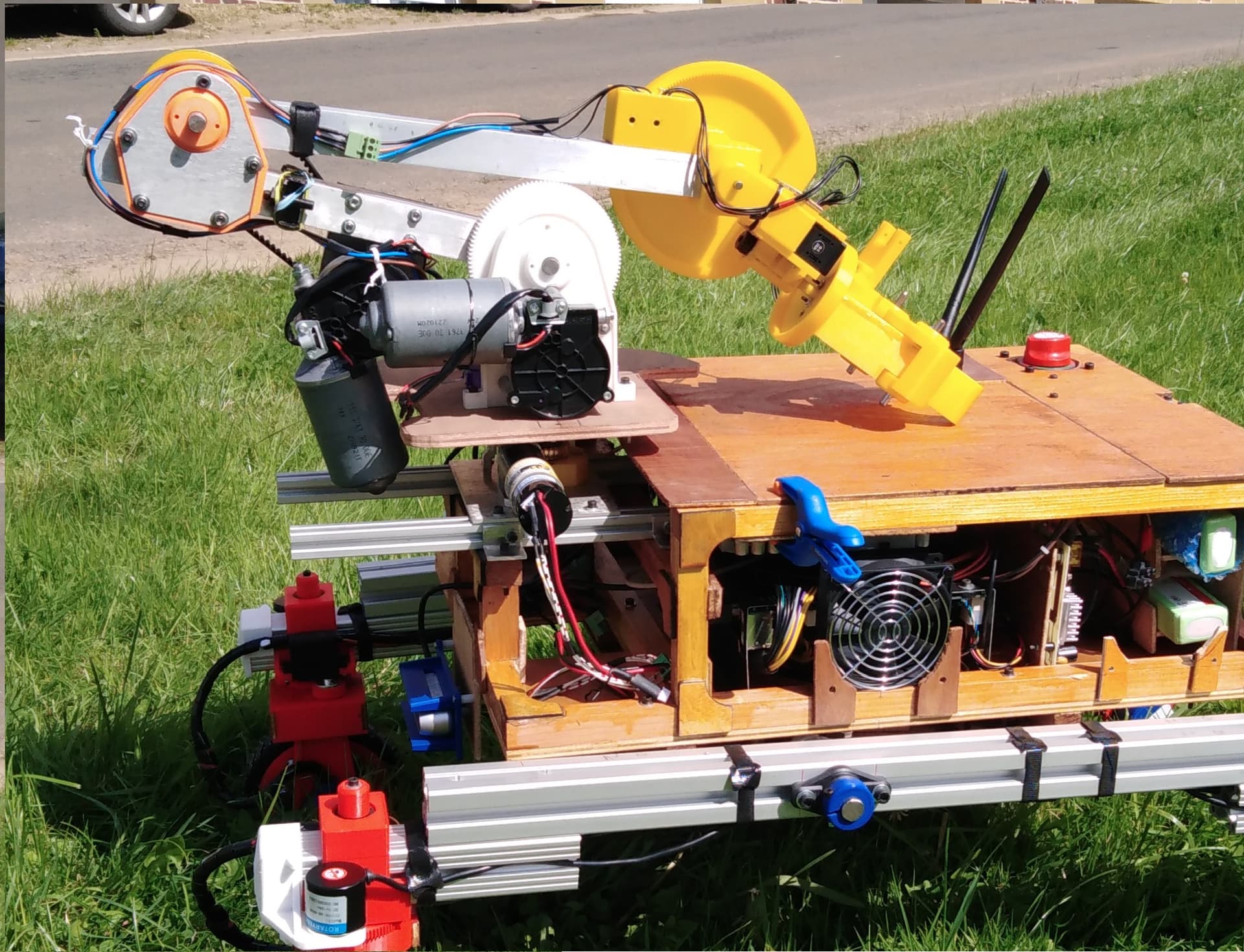
there are DC motor for the axis 0, axis1, axis 2 and dynamixel servos XC 430W240T for axis 3 ans axis 4.
i use the SetPosition.msg modified for my servos.
Messages
uint8 id_3
int32 position_3
uint8 id_4
int32 position_4
uint8 id_6
int32 position_6
the code is there
everything is fine.
the last step is to use a urdf model for remote control.
hence the following question :
is there a way to use , the parameter present_position ( in my case present_position_3 and present_position_4) in ros2_ws from read_write_node() code ?
i would like for example publish present_position_3 and present_position_4 on a topic.
does anyone have an idea ?
thank you in advance