So I built a MAX-E1 robot recently and whenever I try to get it to stand up, it moves to the right slightly. It also leans to the right side when I try to move it forward or backward and it refuses to stand up straight after that. Does anyone know what could be causing this?
1 Like
Perhaps adding some OFFSETS to appropriate servos will help in your case:
-
Make sure that your “working surface” is “horizontal” - a check with a water-bubble level meter would be good.
-
Using the MOTION tool to put MAX-E1 in its INIT POSE - with POWER ON (see picture below)
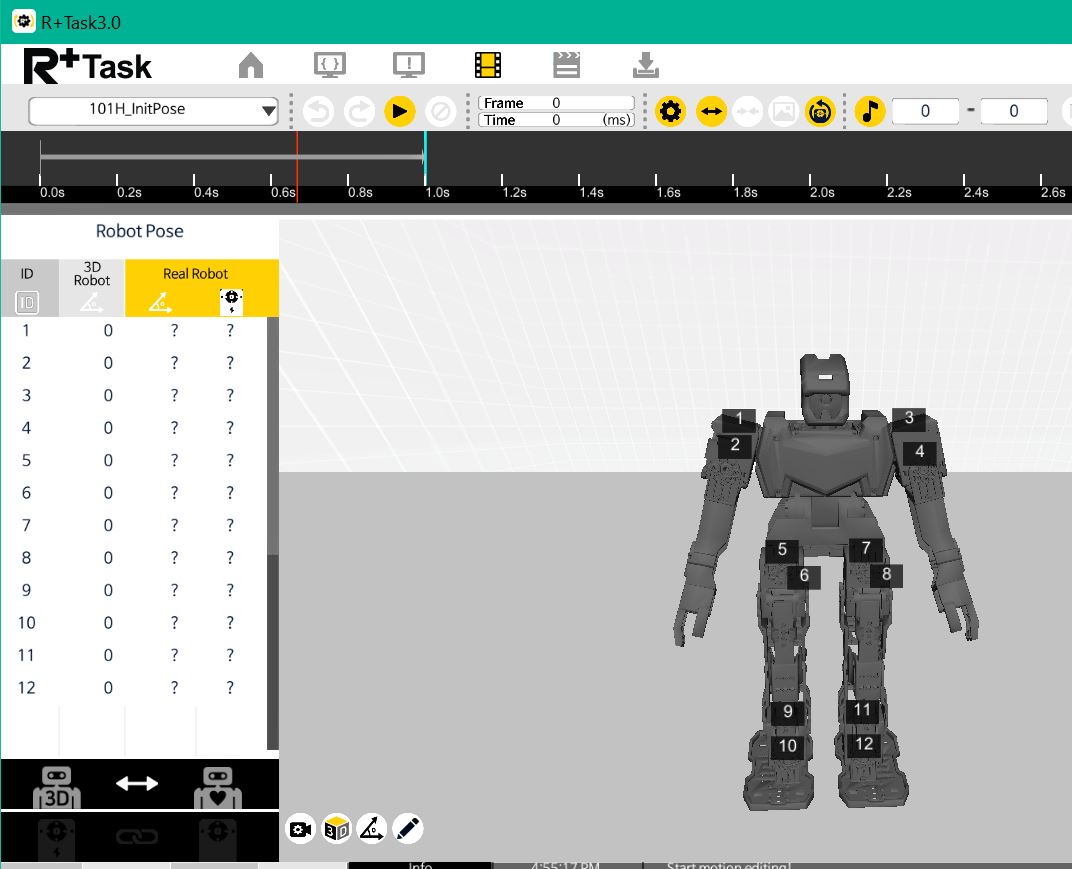
-
Visually check to see if YOUR PHYSICAL MAX-E1 posture is “symmetrical” with respect to “central plane” passing through the middle of its body: i.e., feet flat on the working surface, legs straight up, no leaning forward or backward, no leaning to the left or right side. The arms should hang “level” and “symmetrical” as shown in the 3-D display. From your description of the issues, may be the robot is leaning a bit to the left, and perhaps “backwards” a bit too.
-
If needed, then use the Edit Offset tool to input “appropriate” offsets to the “hip” and “ankle” servos to achieve the “ideal” posture as shown previously.
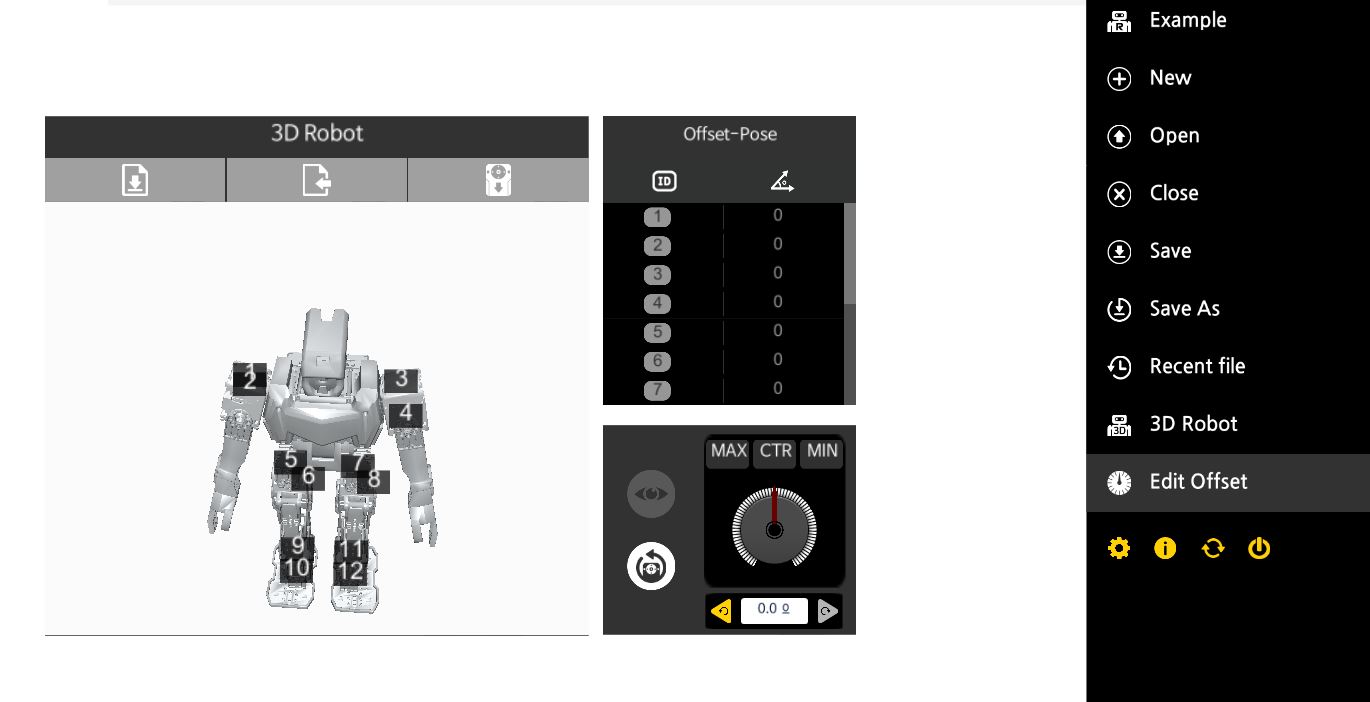
Change the offset values a little bit at a time and give the robot time to set in its “new” posture each time. And don’t forget to save these offsets down to the robot before trying to make it “stand” or “walk”.
Hopefully, with this “static” offset procedure done, your bot can move around better.
I had similar issues with a MAX-E2 which had an extra pan/tilt platform for the head and an RPi-4B on its back. For that one, the “static” offset procedure was not enough, I had to code in TASK a “dynamic” way to change certain servo offsets also.
If you are interested, you can view this YouTube video:

Hope that this will be helpful to you.
1 Like
Hello, can I ask you a question about the MAX E1 version?
Sure. Ask away. Hope to be able to provide you with a working answer.