
The Robotics Roundup is a weekly newspost going over some of the most exciting developments in robotics over the past week.
In today’s edition we have:
- By Your Command
- Preschoolers prefer to learn from a competent robot than an incompetent human, Concordia study shows
- Locus Robotics CEO on the future of warehouse automation
- Watch this robotic dog use one of its ‘paws’ to open doors
- Robotic hand can identify objects with just one grasp
By Your Command
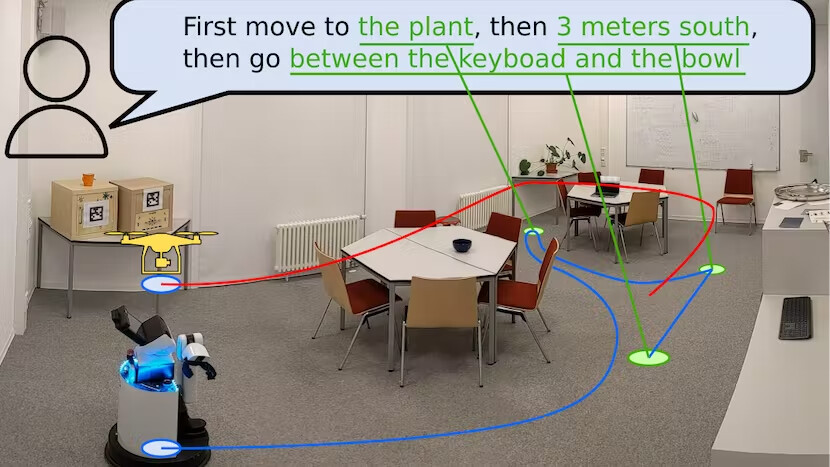
Science fiction robots are often capable of understanding and carrying out complex actions in response to natural language commands. Researchers from The University of Freiberg, Google, and The University of Technology Nuremburg have leveraged developments in machine learning to create VLMaps to attempt to bring this type of natural language instruction to reality.
Preschoolers prefer to learn from a competent robot than an incompetent human, Concordia study shows

As robotics technology improves, educational technology will increasingly incorporate robotics as a way to supplement educational curriculums. This study from Concordia University shows that children as young as 5 can identify incompetent human educators, and that they will prefer to listen to competent robots rather than incompetent humans. This finding shows that not only are children smarter than often given credit for, it also provides proof that children may choose to place their trust in robotic educators rather than their humans when there is an apparent discrepancy in ability.
Locus Robotics CEO on the future of warehouse automation

TechCrunch’s interview with Rick Faulk of Locus Robotics provides lots of interesting information about Locus’ current operational capabilities, as well as their plans for the future.
Watch this robotic dog use one of its ‘paws’ to open doors

While the quadrupedal form factor is an excellent choice providing high mobility across a wide variety of terrains, it also tends to constrain a robot’s way of interacting with the world due to the lack of dedicated manipulation appendages. Carnegie Mellon University and UC Berkeley researchers have written a paper demonstrating techniques for these types of platforms to use their legs as manipulators to try and address this shortcoming.
Robotic hand can identify objects with just one grasp
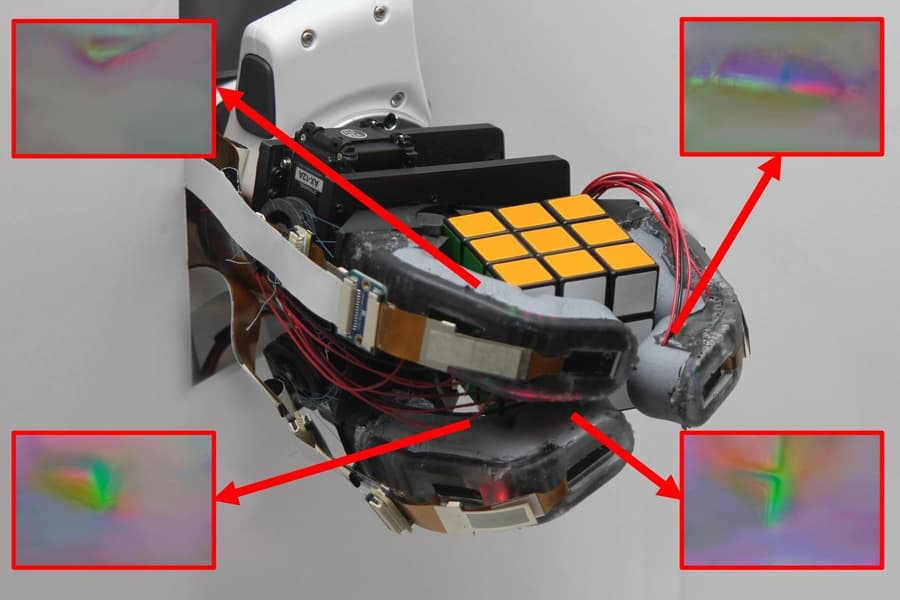
Object identification is an important aspect in many robotics fields, as the first step to successfully processing any object is to identify what it is. This three fingered gripper designed by MIT contains a wide variety of sensors along the entire length of each finger, providing rich data on grasped objects for reliable single grasp identification.