
The Robotics Roundup is a weekly newspost going over some of the most exciting developments in robotics over the past week.
In today’s edition we have:
- An origami-inspired universally deformable module for robotics applications
- An open-source and Python-based platform for the 2D simulation of Robocup soccer
- Computer Science Researcher Creates Flexible Robots
- Semiautonomous recovery system from a stuck state of an articulated mobile robot
- Researchers are helping robots teach themselves to open dishwashers and doors
An origami-inspired universally deformable module for robotics applications

A research team from Westlake University and Zhejiang University in China has developed a new modular robot design inspired by origami, specifically the Kresling pattern. The design utilizes deformable modules driven by pneumatics, allowing the modules to be reshaped to create different shapes and configurations. The researchers created a universal deformation module that can achieve various deformation modes depending on specific pressurization schemes. The module can produce seven different motion modes, making it suitable for adapting to different application scenarios. The team conducted simulations and real-world experiments to evaluate the module’s performance, showing promising results for developing modular robots that can adapt to their environment. The researchers also envision potential practical applications, such as grasping sizable objects, in the future.
An open-source and Python-based platform for the 2D simulation of Robocup soccer
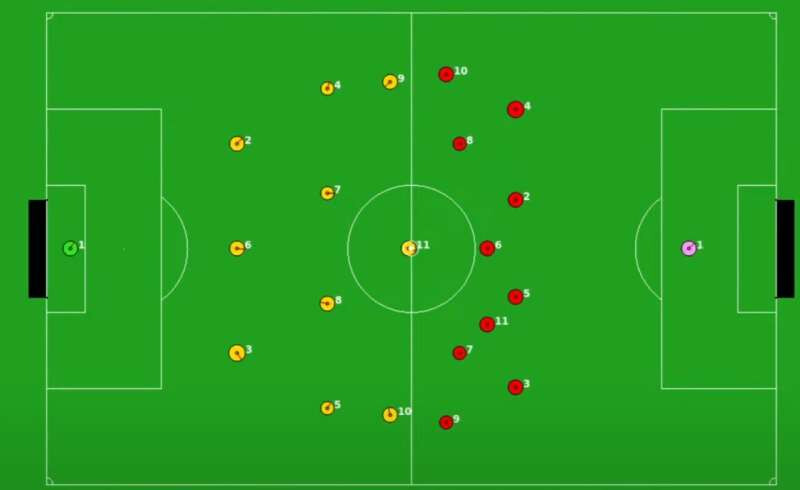
Researchers from Dalhousie University and Memorial University of Newfoundland have developed Pyrus Base, an open-source Python platform for simulating RoboCup soccer in 2D. This platform aims to make it easier for researchers to train and test their robotic soccer-related algorithms. Most existing simulation platforms utilize C++, which can be challenging for less experienced programmers. Pyrus Base simplifies the process by providing a simple and accessible platform that allows even beginners to test AI models for RoboCup. The researchers hope that their platform will encourage more researchers to test their ideas and fuel innovation in the field of robotic soccer. The Pyrus Base code is already available on GitHub and will be optimized and improved in future works.
Computer Science Researcher Creates Flexible Robots
Dartmouth researchers have developed soft robotic blocks that can work together to create structures that can bear weight, roll, walk, grip objects, and transport loads. The modular blocks can change shape depending on the task at hand and can join together in different configurations. The researchers created a variety of structures using these blocks, including a dome-shaped tent, a rolling wheel, a quadruped robot, a robotic arm, and a linear chain. The blocks are made of a combination of plastic and rubber, with mechanical muscles that utilize heat to reshape the blocks. The researchers are working on upgrading the robots to be untethered and hope to see them in outdoor environments soon.
Semiautonomous recovery system from a stuck state of an articulated mobile robot
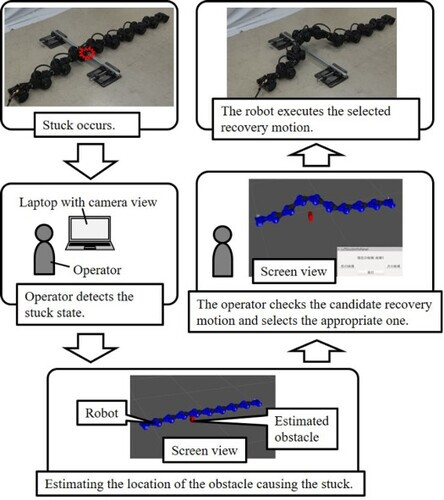
The paper describes a semiautonomous system that can recover a stuck articulated mobile robot. The system classifies stuck states into four types based on the position of contact with the environment. Using a pressure sensor, the system identifies the contact area causing the movement failure. Motion candidates for recovery are autonomously calculated and presented to the operator, who selects the appropriate motion. Experiments with a developed robot demonstrate the effectiveness of the proposed system in recovering the robot from each stuck state.
Researchers are helping robots teach themselves to open dishwashers and doors
New research from ETH Zurich introduces a model that requires minimal manual guidance for robots to perform complex tasks like opening doors or moving around objects. The system breaks down the process into three steps: describing the scene and action, planning a route, and refining the route into a minimal viable path. The system can be adapted for different robot form factors and is demonstrated using the quadruped robot ANYmal. The research is seen as a step towards developing fully autonomous loco-manipulation pipelines and robots that can open doors without human intervention.