
The Robotics Roundup is a weekly newspost going over some of the most exciting developments in robotics over the past week.
In today’s edition we have:
- Creating magnetic soft robots using fiber-based processes and unidirectional magnetic fields
- Robot Dog Masters Balance: Walking Across a Beam with Grace and Agility
- This Shape-Shifting Robot Could Help Astronauts Transport Objects on the Moon
- ChatGPT designs its first robot with TU Delft researchers
- Four-Legged Robot Traverses Tricky Terrains Thanks to Improved 3D Vision
Creating magnetic soft robots using fiber-based processes and unidirectional magnetic fields
A team of material scientists and electronic engineers at MIT has successfully developed 3D magnetically controlled soft robots, overcoming challenges faced by previous attempts. These robots are controlled using a magnetic field and offer greater functionality compared to traditional two-dimensional structures.
By varying the applied strain and magnetic field strength, the researchers achieved control over the 3D robots, resulting in crawling and walking behaviors. The robots could also be programmed to carry cargo or coordinate with other similar robots. The scalability of the design opens possibilities for biomedical and engineering applications of magnetically controlled soft robots.
Robot Dog Masters Balance: Walking Across a Beam with Grace and Agility
Researchers at Carnegie Mellon University’s Robotics Institute have accomplished a remarkable feat with an off-the-shelf quadruped robot. They have successfully enabled the robot to traverse a balance beam with agility and stability, which has never been done before.
To address the challenge of maintaining balance on a narrow beam, the researchers incorporated a reaction wheel actuator, commonly used in spacecraft, into the robot. This actuator allows the robot to balance itself regardless of the position of its feet, unlike animals that rely on tails or flexible spines. By mounting two reaction wheel actuators on the pitch and roll axis of the robot, it achieved balance irrespective of foot placement. The researchers’ work showcases the potential of integrating existing technologies from various fields to overcome specific challenges in robotics
This Shape-Shifting Robot Could Help Astronauts Transport Objects on the Moon
Researchers from the Swiss Federal Institute of Technology Lausanne (EPFL) have developed Mori3, a modular robot that can be assembled from smaller parts to form a swarm of connected pieces. The individual modules can come together to create various shapes and perform different tasks using polygon meshing. The Mori3 robot is capable of changing its size, shape, and function depending on the environment and task at hand. It can move, handle objects, and interact with users. The researchers envision Mori3 assisting astronauts on Moon colonies and potentially on Mars in the future. The polygon-based modular design offers a new approach to robotics, expanding possibilities for various applications.
ChatGPT designs its first robot with TU Delft researchers

Researchers from TU Delft and EPFL explored the use of ChatGPT, an open AI platform, in the design process of a robot, which resulted in the creation of a tomato-harvesting robot. ChatGPT provided valuable input and suggestions throughout the conceptual and implementation phases of the design. The collaboration between humans and AI was found to be positive and enriching, although it shifted the engineers’ role towards more technical tasks. The researchers acknowledged the risk of misinformation and bias in the output of large language models (LLMs) like ChatGPT, emphasizing the importance of verification and validation. They also raised concerns about issues such as plagiarism, traceability, and intellectual property in working with LLMs. The researchers plan to continue using the tomato-harvesting robot in their robotics research and explore the autonomy of AIs in designing their own bodies, while considering how LLMs can assist robot developers without limiting creativity and innovation in the field.
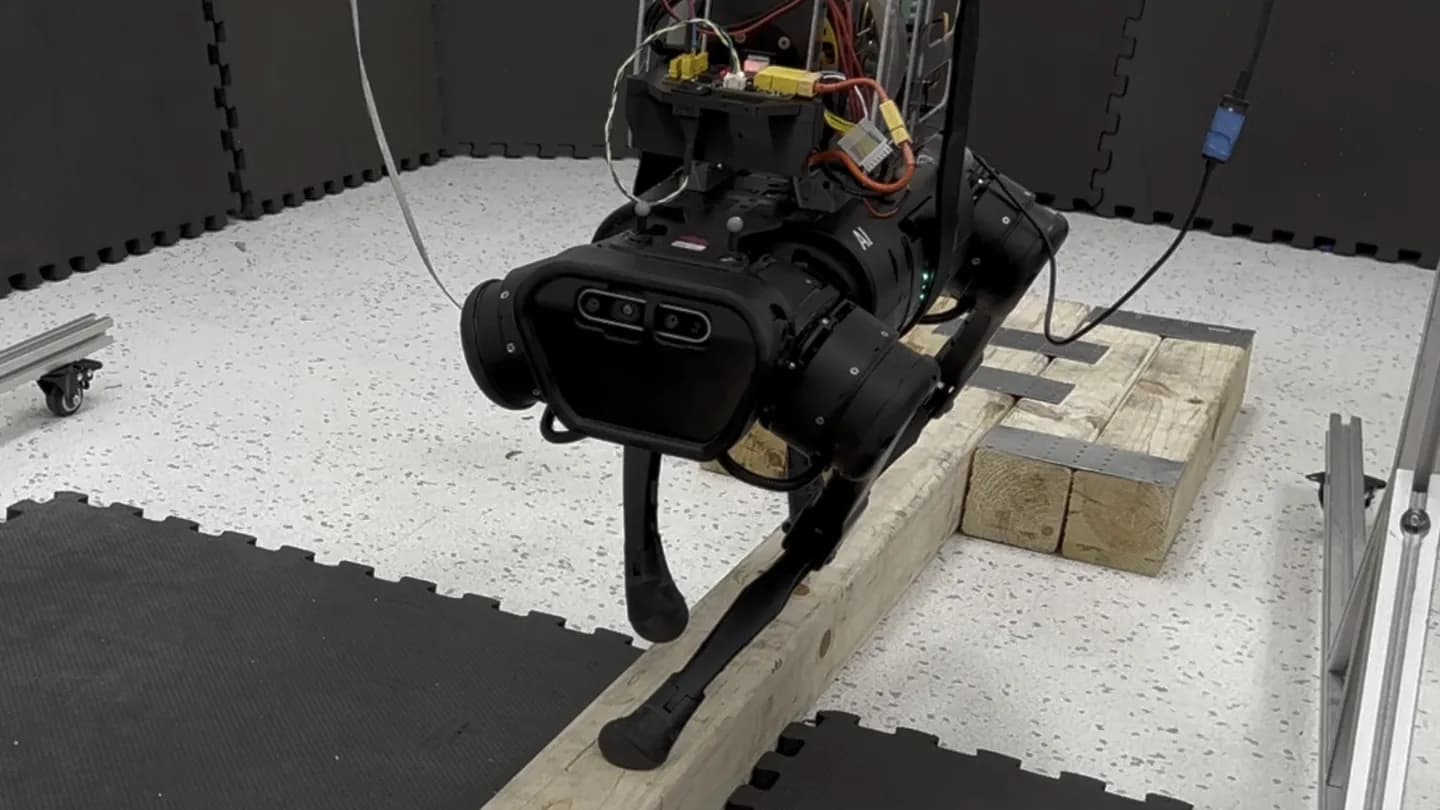
Four-Legged Robot Traverses Tricky Terrains Thanks to Improved 3D Vision
A team of researchers from the University of California San Diego has developed a new model that enhances the 3D perception of four-legged robots. By equipping the robot with a forward-facing depth camera and using a model that translates 2D images into 3D space, the robot gains a better understanding of its surroundings. The model analyzes video sequences from the camera, extracting 3D information and comparing it with the current frame to estimate the robot’s leg movements and the transformation between past and present. By synthesizing visual information and utilizing its short-term memory, the robot can autonomously navigate challenging terrains, including stairs, rocky ground, and obstacle-filled paths.