
The Robotics Roundup is a weekly newspost going over some of the most exciting developments in robotics over the past week.
In today’s edition we have:
- Robotics and Mechanisms Lab at UCLA Creates World’s Fastest Walking Humanoid Robot
- Mix-and-match kit could enable astronauts to build a menagerie of lunar exploration bots
- Škoda Found a Good Use for Big Grilles and Robots: Pedestrian Safety
- Resilient bug-sized robots keep flying even after wing damage
- Robot Centipede with Flexible Drive Train
Robotics and Mechanisms Lab at UCLA Creates World’s Fastest Walking Humanoid Robot

The RoMeLa Lab at UCLA has long been innovating in robotics development. Their newest Artemis platform is yet another breakthrough in this field thanks to their custom designed actuators.
Mix-and-match kit could enable astronauts to build a menagerie of lunar exploration bots
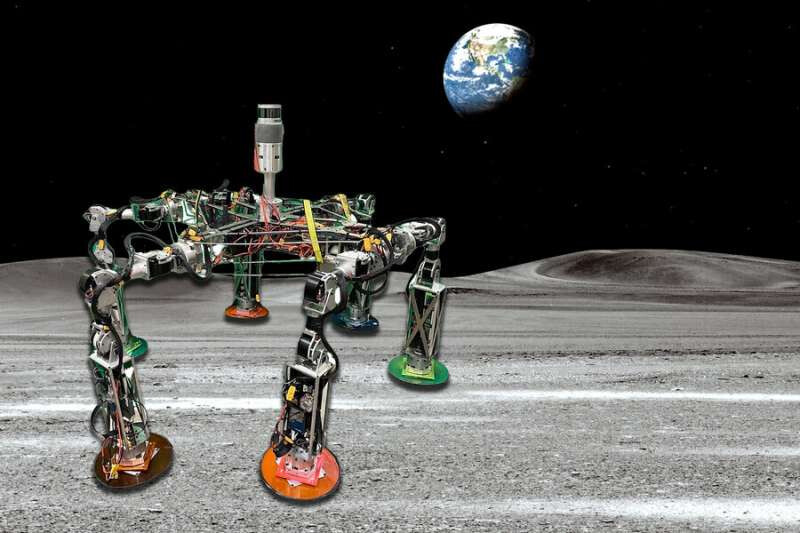
Increasing weight efficiency is one of the most important consideration for designing anything intended for use in space, due to the cost of launching large payloads. MIT’s WORMS robots aim to help solve this problem, and increase the flexibility of their platform by building their robot out of modular building blocks. This allows different robots to be built for different situations, while allowing the repurposing of the modules when a specific configuration is no longer needed.
Škoda Found a Good Use for Big Grilles and Robots: Pedestrian Safety

One of the interesting side effects of the ongoing development of autonomous and electric vehicles is that cars soon may start to look radically different. In this instance, electric vehicles no longer require the large intake grilles neededfor airflow and cooling for an internal combustion engine. Rather than let this newfound space go to waste, Škoda’s engineers designed a prototype signaling system to notify pedestrians about the car’s status.
Resilient bug-sized robots keep flying even after wing damage
Self repairing robots are a frequent staple of science fiction. This research paper shows that by adapting some lessons learned from bumblebees, we can bring these types of reliable and resilient robotics closer to reality.
Robot Centipede with Flexible Drive Train

James Bruton has created another robot with a novel method of locomotion. While this is just a prototype for an eventual design large enough to mount a human rider, it’s interesting to think about what other kinds of mobility mechanisms are possible with robotics.