
The Robotics Roundup is a weekly newspost going over some of the most exciting developments in robotics over the past week.
In today’s edition we have:
- The race to the first useful humanoid robot: 24 demos
- High-speed humanoid feels like a step change in robotics
- ‘Swarm of one’ robot is a single machine made up of independent modules
- Scientists Design a Two-Legged Robot Powered by Muscle Tissue
- Researchers develop non-contact touch sensors for robotics
The race to the first useful humanoid robot: 24 demos
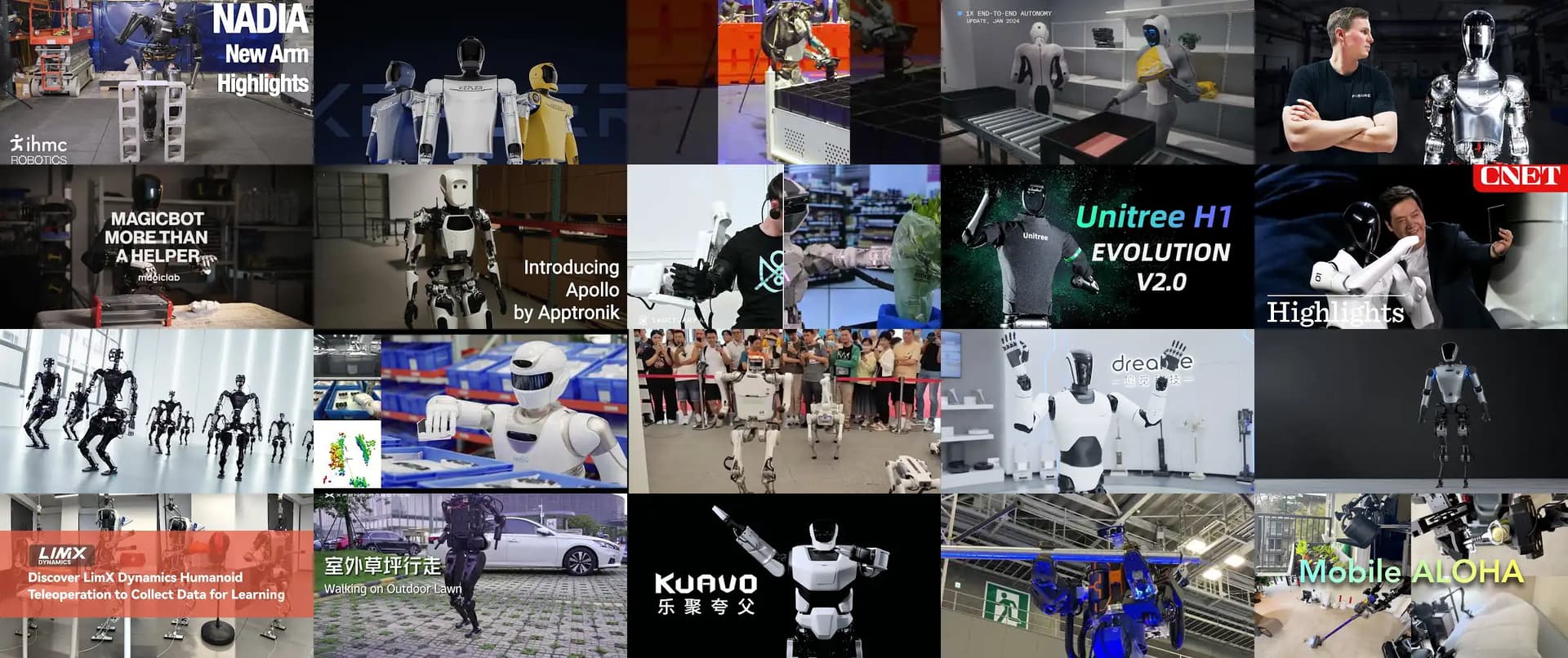
The article discusses the increasing pace of developments in humanoid robotics, with numerous companies across the globe actively competing to create practical and cost-effective models. The significant advancements in Artificial Intelligence (AI) is believed to be the key to solving the long-standing software challenges in robotics, making the creation of fully autonomous, useful humanoid robots a potential reality in the near future. A total of 24 recent demos from different teams are highlighted, including Apptronik’s “Apollo”, 1X Technologies’ “NEO”, Agility Robotics’ “Digit”, and others. Several of these robots are already being put to work in real-world settings, like warehouses and factories, with many more planned to be mass-produced soon. The article underscores the belief that the world is on the cusp of a transformative age of ubiquitous robots, akin to the impact of smartphones today.
High-speed humanoid feels like a step change in robotics

Canadian company Sanctuary AI’s robot, Phoenix, is demonstrating exceptional capabilities in humanoid robotics. Despite being on a wheeled platform, its hydraulic hands demonstrate high levels of precision, strength, and speed, outpacing competitors such as Tesla’s and Figure’s robots. Sanctuary’s unique approach involves training Phoenix in fundamental movements through teleoperation and simulations. The robot’s motion, now fully autonomous, is faster, more fluid, and more natural-looking than other humanoid robots, signifying a significant advancement in the field. Sanctuary’s co-founder and CTO, Suzanne Gildert, likens their training process to a baby learning to manipulate objects, with the goal of enabling the robot to perform any task a human can do.
‘Swarm of one’ robot is a single machine made up of independent modules

Researchers at West Virginia University have developed a unique robot named Loopy, which is composed of 36 connected cells, each with a rotary servo and sensors. This design allows the robot to morph into various shapes and move independently without a central controller. Inspired by the concept of self-organization, Loopy forms stable shapes that can adapt to and recover from encounters with obstacles, effectively tailoring its shape and movement to its environment. This bottom-up design approach allows the robot to exhibit a form of collective “intelligence”, enabling it to find its own solutions in new situations. This research could potentially be applied to adaptive robots in fields such as environmental cleanup. The team aims to further develop Loopy’s capabilities to navigate unforeseen situations, perform tasks assigned by people, and exhibit more lifelike traits.
Scientists Design a Two-Legged Robot Powered by Muscle Tissue
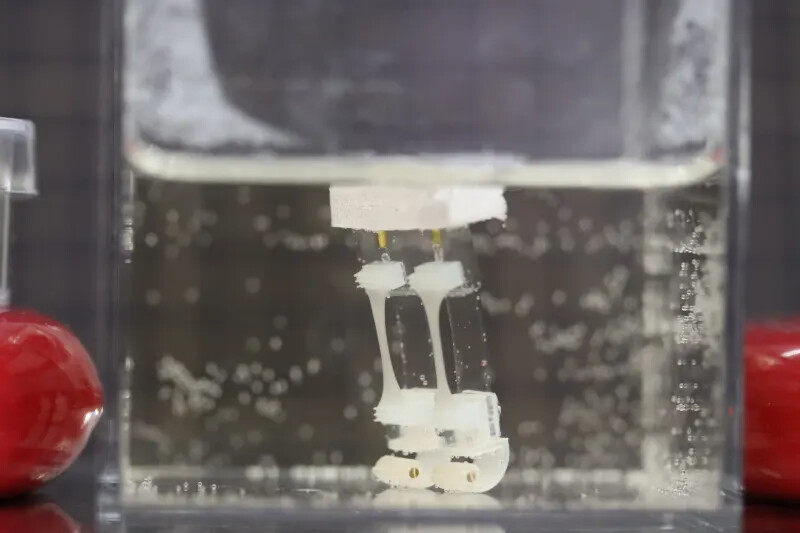
Researchers at the University of Tokyo, Japan, led by Shoji Takeuchi, have developed an innovative two-legged biohybrid robot that combines muscle tissues with artificial materials. The robot, designed to mimic human gait, operates in water and is capable of efficient, silent, and delicate movements. It uses a silicone rubber skeleton, with strips of lab-grown skeletal muscle tissues attached to each leg. When the muscle tissue is stimulated with electricity, it contracts and lifts the robot’s leg, enabling it to “walk” and make fine-tuned turning motions. The team is working on integrating the electrodes into the robot to improve efficiency and plans to add joints and thicker muscle tissues for more sophisticated and powerful movements. However, they must first develop a nutrient supply system to sustain the living tissues and structures that allow the robot to operate in the air.
Researchers develop non-contact touch sensors for robotics
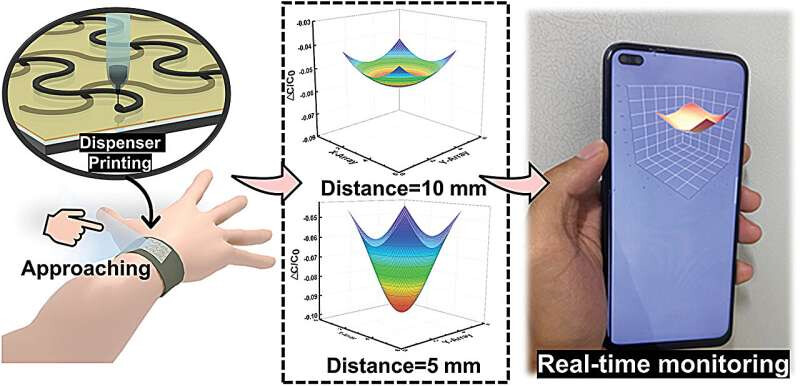
Researchers at Qingdao University in China and collaborators in South Korea have developed a highly sensitive, non-contact touch sensor for robotics and bio-mimicking applications. The sensor operates by sensing interference in the electric field between an object and the sensor, even at distances up to 100 millimeters away. The sensor is composed of graphitic carbon nitride added to polydimethylsiloxane, allowing it to detect objects between 5 and 100 millimeters from their surface. The team found the sensor to be reliable and fast in response, making it suitable for wearable technologies used in medical monitoring or for the “internet of things”. Future plans include refining the sensor technology to make it suitable for mass production and exploring its potential beyond detecting shape and movement, such as gesture recognition and human motion detection.