
The Robotics Roundup is a weekly newspost going over some of the most exciting developments in robotics over the past week.
In today’s edition we have:
- ‘Power tower’ rover to land on the moon by 2025
- Flocks of assembler robots show potential for making larger structures
- Soft Robots Picking Up Delicate Droplets That Humans Can’t
- A deep learning model that generates nonverbal social behavior for robots
- A Palm-Sized Omnidirectional Mobile Robot Driven by 2-DOF Torus Wheels
‘Power tower’ rover to land on the moon by 2025
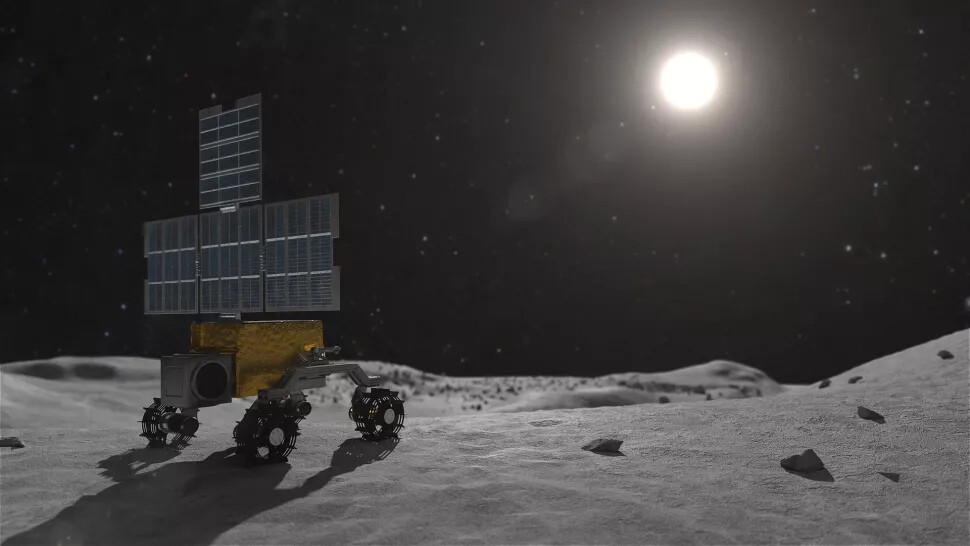
Robotics startup company STELLS SPACE is planning to land a specially designed charging rover to the moon by 2025. The rover is designed to place a wireless charging base station inside a shadowed crater, and park itself on the exterior of the crater so that it’s solar panels can deliver power to the charger and restore power to other rovers located within the shadowed crater.
Flocks of assembler robots show potential for making larger structures
MIT’s Center for Bits and Atoms is developing a modular assembly structure to simplify the construction of complex assemblies. This voxel based mechanical framework allows the rapid construction of complicated and large structures, as well as self replicating robotic systems.
Soft Robots Picking Up Delicate Droplets That Humans Can’t
Researchers from the Adaptive Robotics Laboratory at Colorado State University have developed a novel soft robotic gripper capable of picking up individual liquid droplets.
A deep learning model that generates nonverbal social behavior for robots
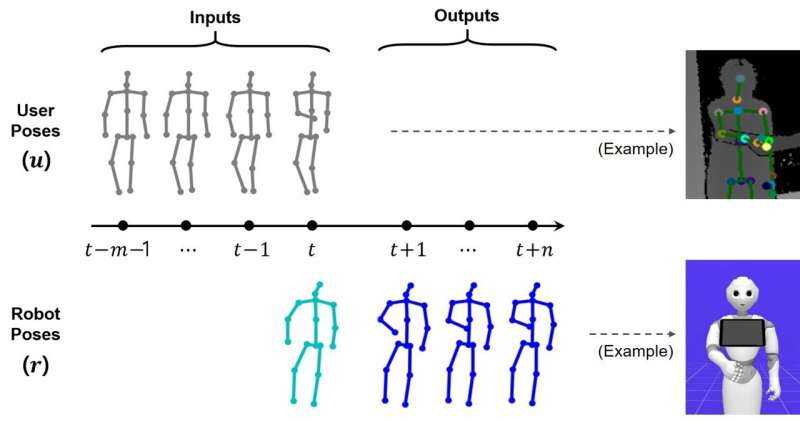
The Electronics and Telecommunications Research Institute (ETRI) in Korea has developed a deep learning neural network to allow social robots to learn nonverbal social behavior by observing human interactions.
A Palm-Sized Omnidirectional Mobile Robot Driven by 2-DOF Torus Wheels
Yunosuke Sato, Ayato Kanada, and Tomoaki Mashimo have developed a novel extremely simple and tiny omnidirectional mobile robotics platform utilizing two torus wheels for locomotion.