Issue:
I am looking for any guidance on troubleshooting the serial communication of the Dynamixel Servo Motor XH430-W210-T/R on Linux. I am following through with the instructions on how to run the sample code in C on Linux. The instructions can be found here: Dynamixel SDK
Specifically, I am following 4. Library Setup 4.2. C Linux instructions.
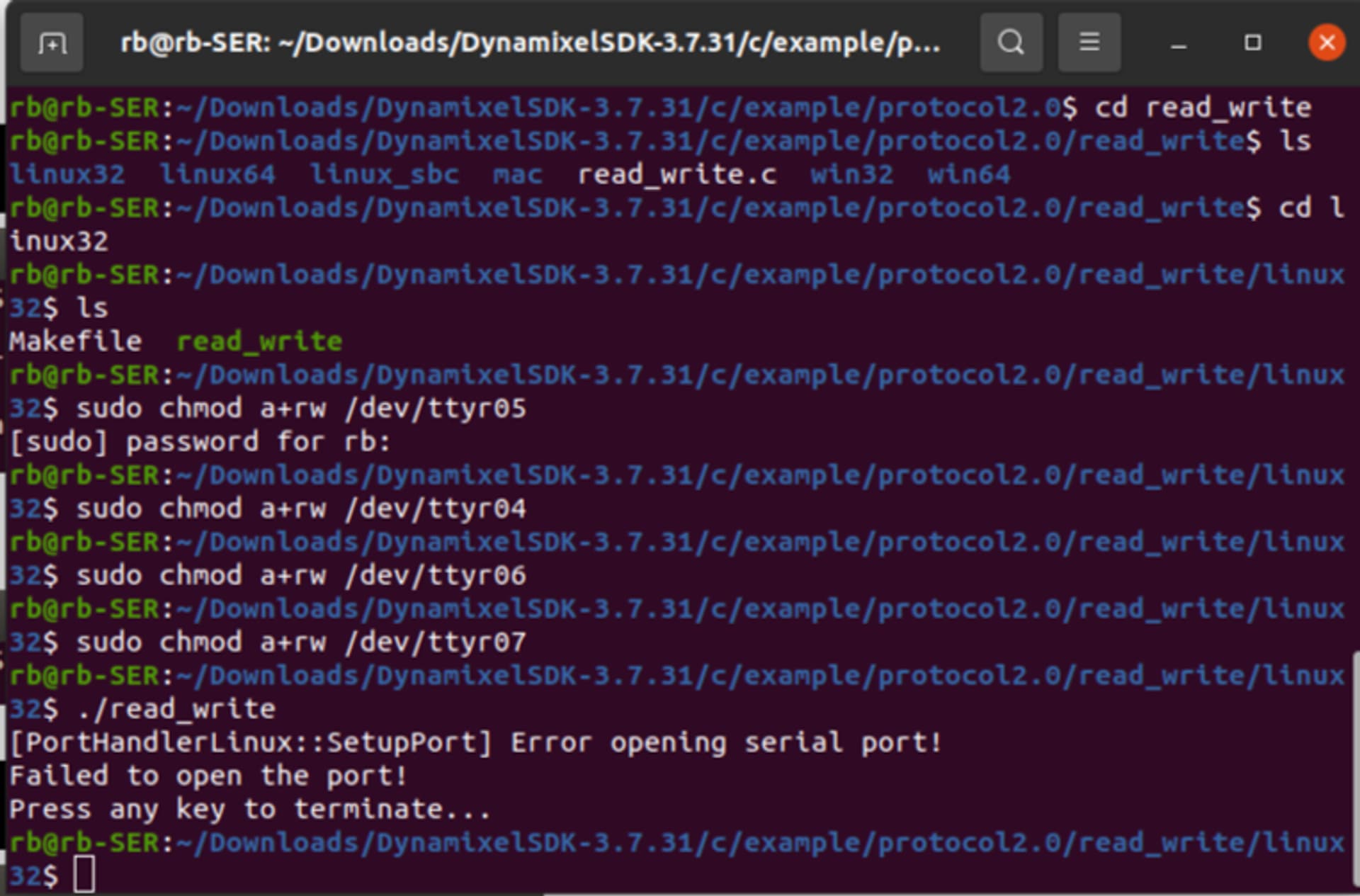
Here is an image of that I receive as the output through the terminal:
DYNAMIXEL Servo:
XH430-W210-T/R
DYNAMIXEL Controller:
Dynamixel Wizard - unable to scan and identify the servo motors
Terminal - unable to communicate with the servo motors
PuTTy - blank black screen appears but hangs and shows no output
Software Interface:
Ubuntu Version 20.04.6 LTS 64-bit / Gnome Version 3.36.8
What kind of communication hardware do you use between your Linux Box and the XH-430? The U2D2 module?
Also did you build the DXL SDK OK?
We’re using the Moxa NPort IA5450A for communication hardware. I downloaded and built the SDK, however, I’m unable to establish communication with the com port that the servo is connected to.
Robotis DXLs need half duplex comm. Can your hardware do that? If not you need to buy a U2D2 module from Robotis.
I’m not sure about that. However, if I were to switch over to the windows 11 side of the machine, everything works fine. I can use the dynamixel wizard and control the servos with no issues. I believe there might be something on the linux side that isn’t open or communicating that won’t allow me to talk to the servos.
I just have a closer look at the Moxa NPort IA5450A and it looks like that it uses the Ethernet Port on the Linux box and converts the comm. to RS-232 which then controls the DXLs directly? without any half-duplex circuitry at all? and that device does not have any DXL connectors at all. So, your Windows 11 results are quite amazing to me, and this is beyond my current experiences for sure. Usually, I just use USB devices such as U2D2.
You said that you can use Windows 11 and Dynamixel Wizard 2 to control the DXL OK, right? Can you try to use DXL SDK from Windows 11 then? If this setup works OK for you, then we’ll know that it is a matter of some Linux Driver and the MOXA device, right?
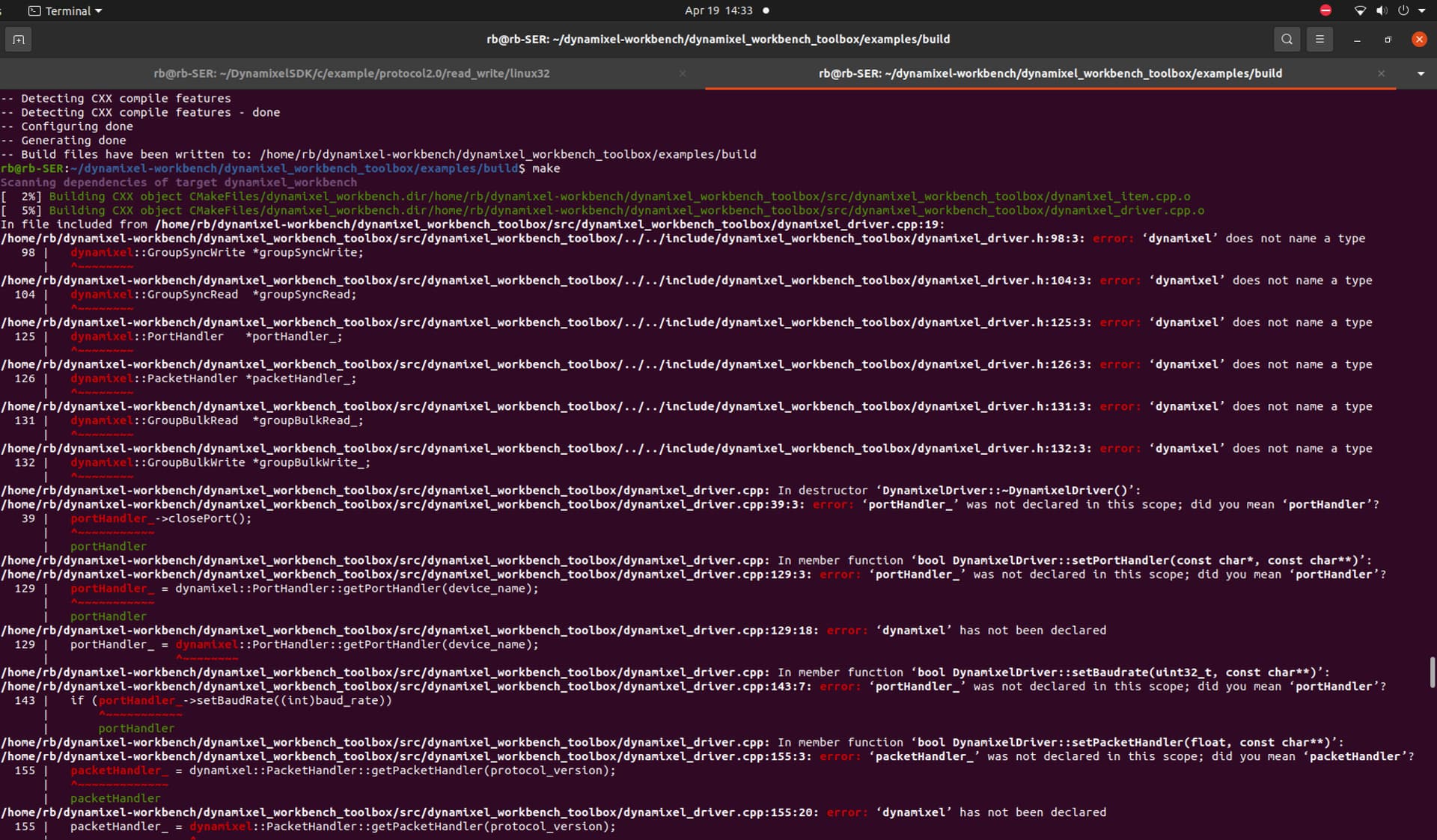
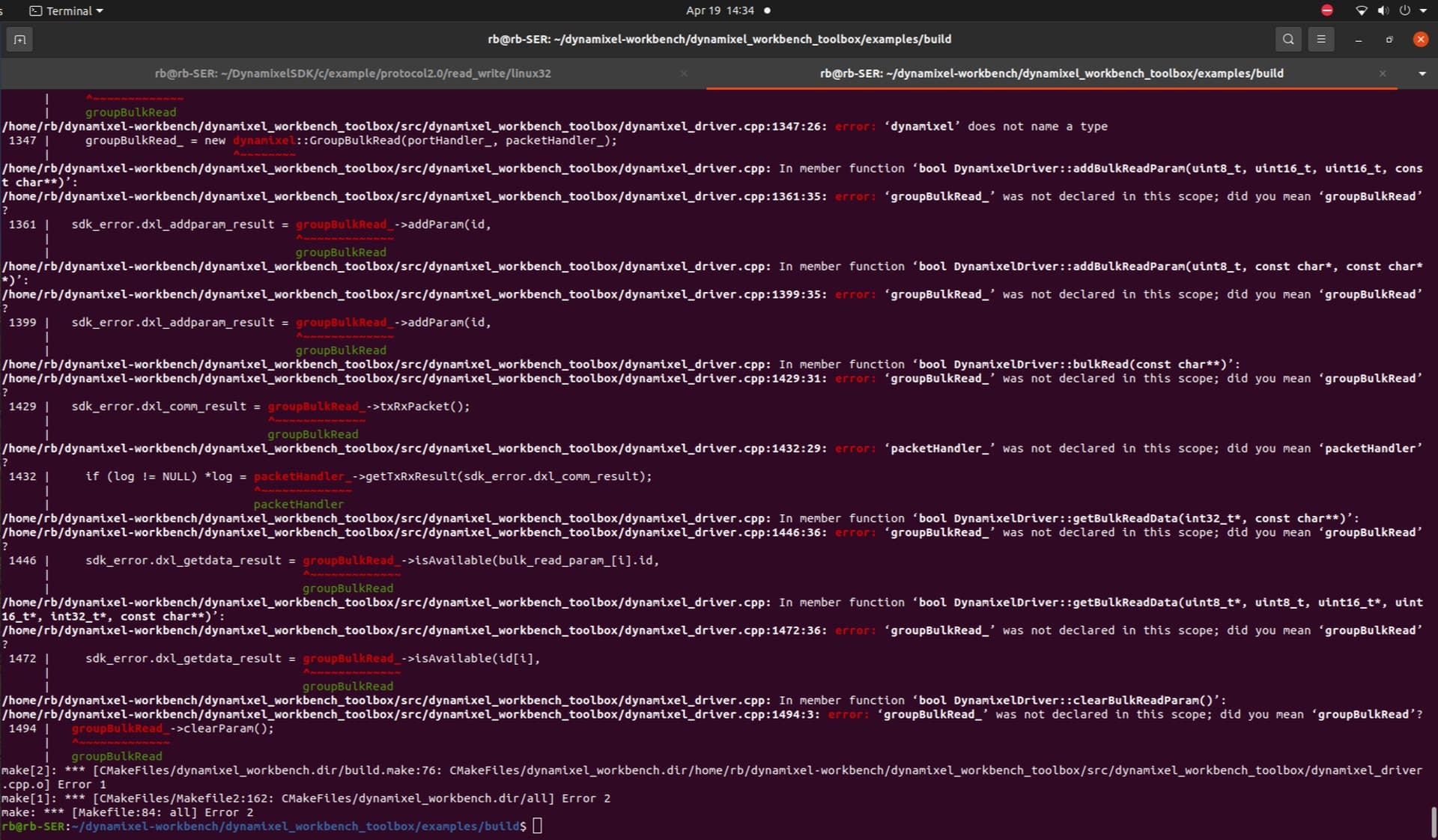
Instead of using the moxa, I tried to use a third party RS-232 to USB device and was able to execute the sample code. However, I now have a new problem getting the work bench to work properly. I’m not sure if these errors are due to depreciated code or improperly installing the workbench files. I’ll try to move forward with using ROS with the servos. In the end, we believe that there is an issue with either permissions or drivers not communicating properly on the moxa side.
Great to hear that you are making good progress. I do not use ROS with DXL SDK, and I can see that you were using an older version.
The latest version supporting ROS 2 is 3.7.60 and supposedly that version does not use Work Bench anymore. Please check with Robotis GITHUB