Hello,
We really enjoy using dynamixel motor xm430-w350-R. We would like to ask the question about what we observed during actuating 37 xm430-w350-R motors.
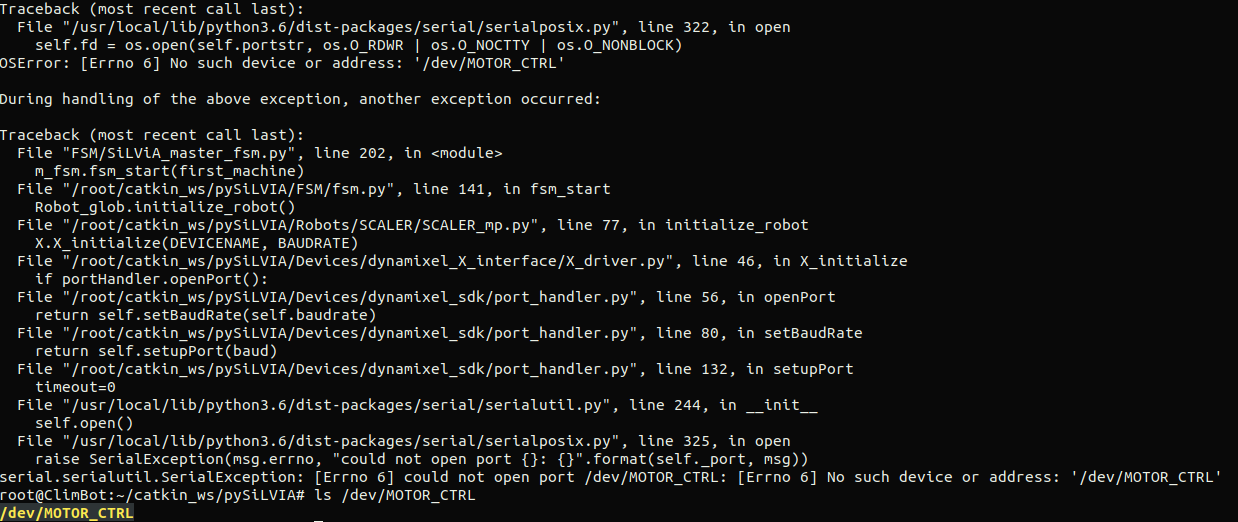
During the experiment, we sometimes observe the following warnings, which stop communication between the motors and the operation PC. We did not observe that the wires are disconnected physically.
Here, I’d like to put the specification we are using:
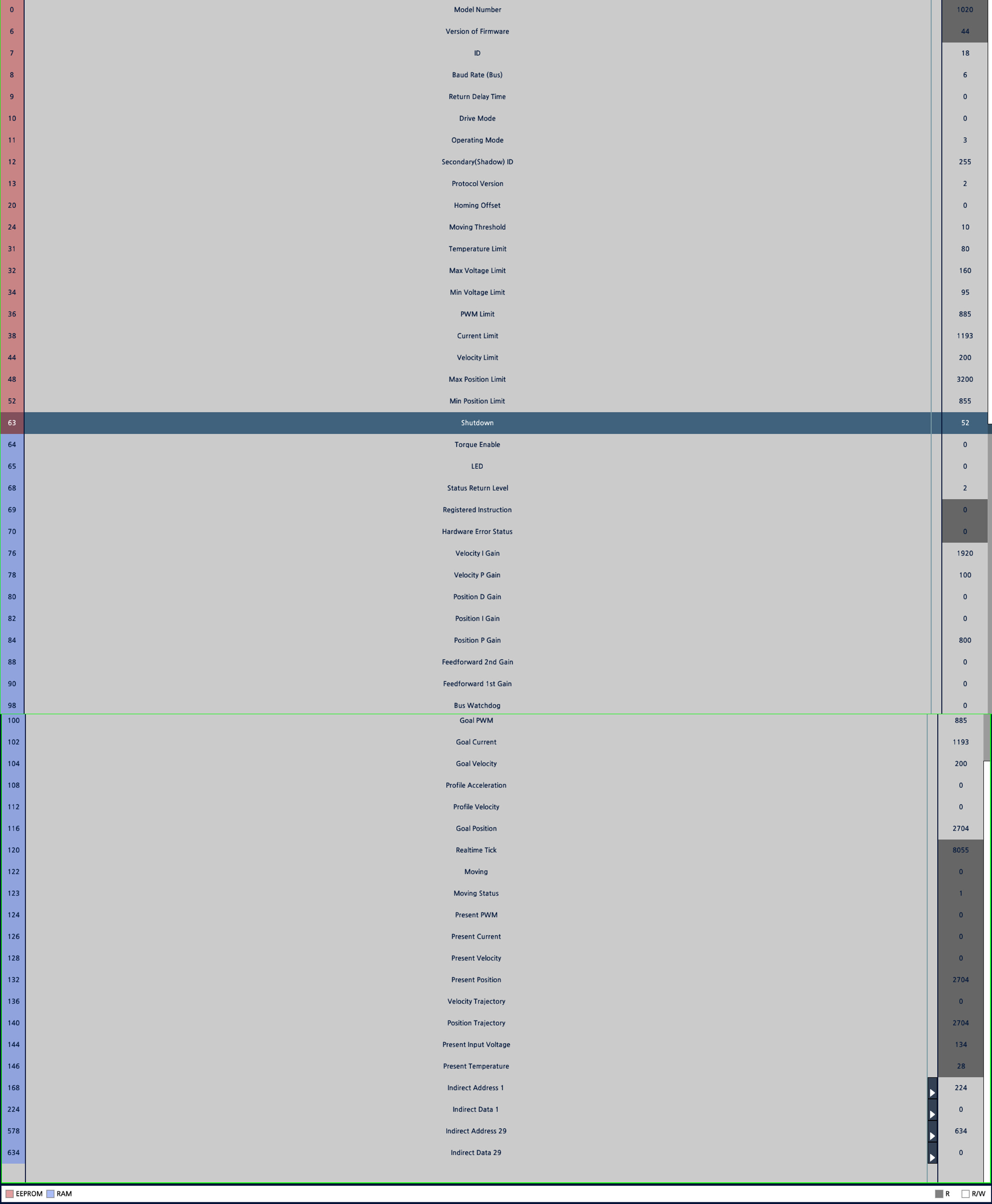
- We use the following setting for all 37 motors via R+ manager (of course, motor ids are different among different motors):
- We use the following items to make communication between the computer and the motors: OpenCM 485 Expansion Board, U2D2.
- The circuit works as follows:
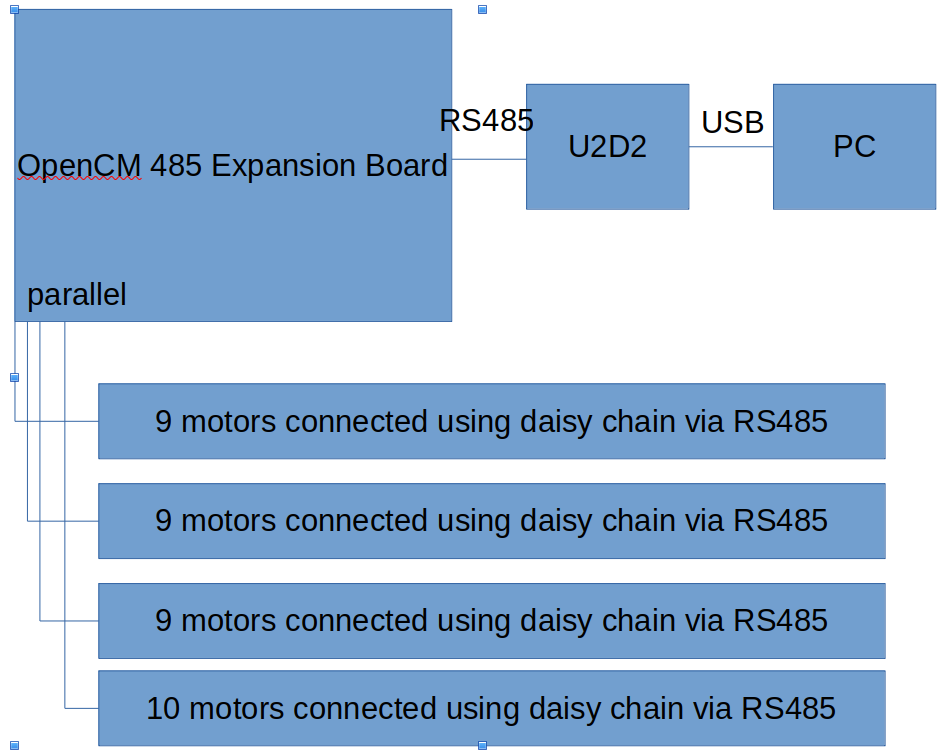
So, we have 4 parallel communication serial chains where each serial daisy chain is connected via RS485. From OpenCM 485 Expansion board to U2D2, it is connected via RS485. Then, U2D2 is connected to PC via USB.
- We use 14.1 V as an input voltage to the OpenCM 485 Expansion board.
- We use Python 3.
- We use DEFAULT_BAUDRATE = 4000000 in port_handler.py in dynamixel_sdk.
So, could you tell us what’s going on? If possible, it’d be appreciated if you let us know how to fix this problem. Please let us know if you need more information/questions!
We look forward to hearing from you!
Best regards,