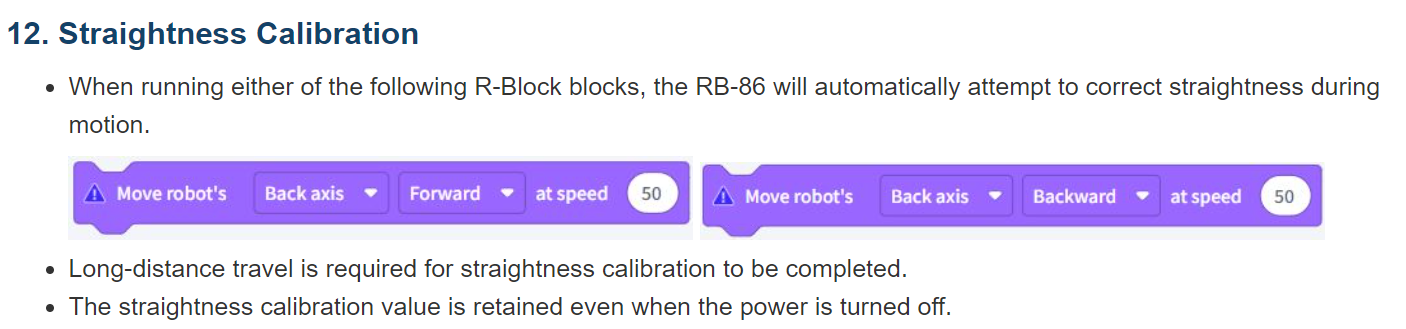
To complete the automatic straightness tuning you just need to remove the “forever” block wrapping around the movement command. The robot should then travel forward indefinitely and correct the wheel rotation speed.
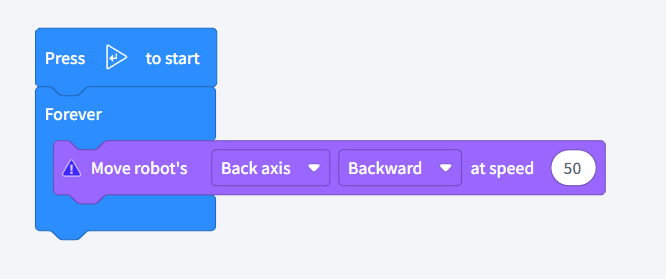
However, I am confuse on your reply. Your “remove the “forever” block wrapping around the movement command” means that the R-Block code is only like this:
??? When I run this code the robot is not moving at all, it will directly play the program end melody… Is this the way to do the automatic straightness tuning?
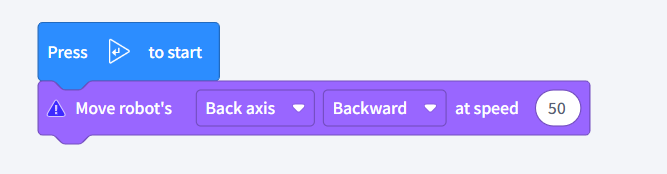
And when I put in forever like this
The robot still moving forward left…
Can you please teach me the steps in more detail to tune the straightness and test the result? Thank you very much…
@Robotclub Please try this approach to see if things would work properly for you.
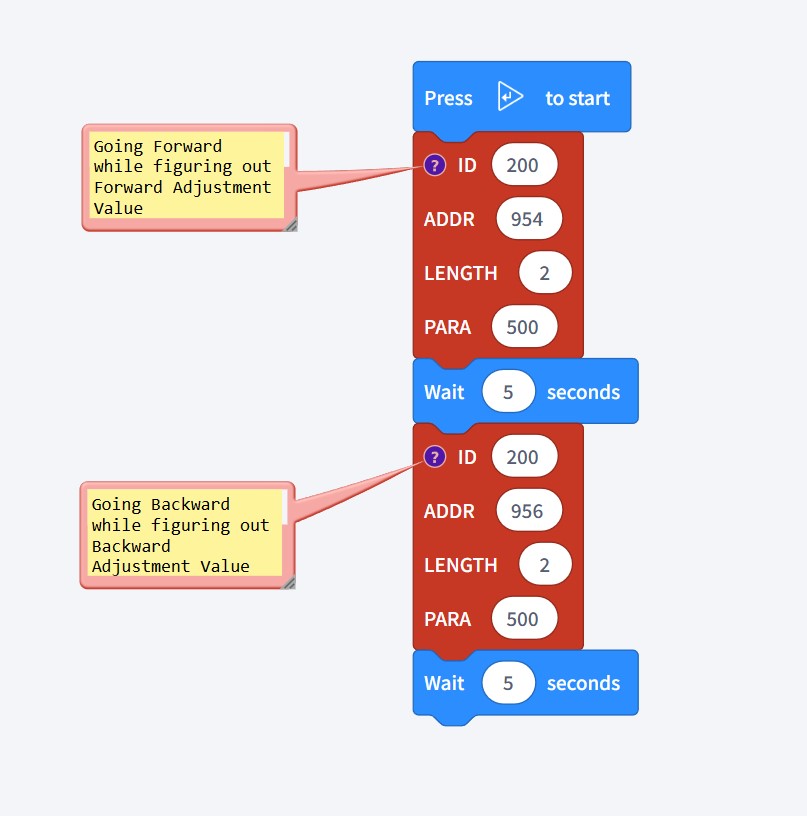
Just to be 100% sure, I used Control Table functions directly in the R-BLOCK code below
Next I tested this code on an RB-86 configured as a Simple Vertical Wheeled Platform on a hardwood floor.
And I could see that this robot could go straight without any problem.
Next, I tested this code on a 4-wheel carbot with rubber tires on all 4 wheels.
Also no problems for this carbot to go straight forward or backward.
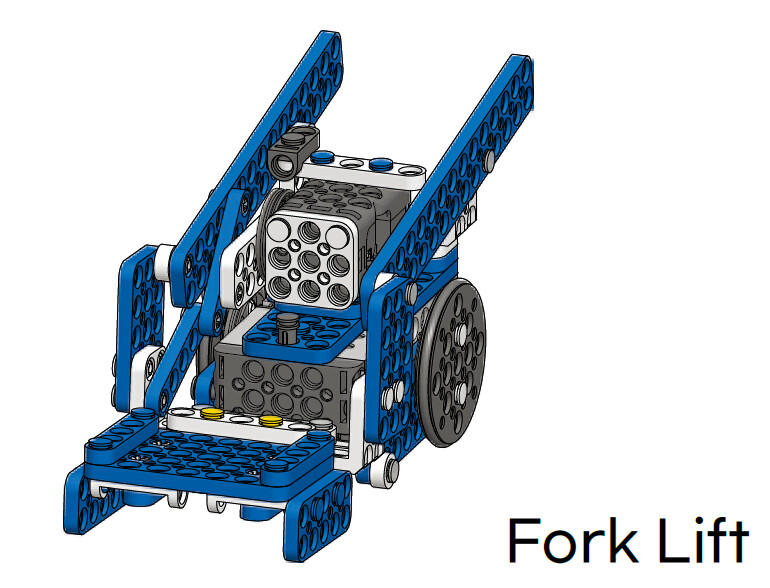
However when I looked at the design of the ForkLift robot, its front wheels do not have rubber tires and possibly some additional “slipping & sliding” actions on those blue frame parts at the front too, if the forks assembly is “down” on the floor when the forklift is programmed to go forward.
so I took the rubber tires out of the front wheels of my carbot. And Lo & Behold, my carbot could not go straight anymore, it pulled to one way when it went forward, and it pulled to the other way when it went backward.
So from my experiments, it looks like that the ROBOTIS “go-straight” algorithm cannot work properly when your robot’s platform is slipping and sliding somewhere with its contact areas with the ground surface.
For your particular case, can you modify the front wheels so that the smaller rubber tires are used instead those white smooth bushings? Also make sure that the fork assy clear the ground when moving the robot around. Hopefully your robot can go straighter then?
One last thought/warning though, using rubber tires on the front wheels will make it harder for the robot to rotate left & right as compared to when using those “smooth” plastic parts. So as always, “Engineering” work is a “Compromise” !
May be a 3-points ground-contact design is better than a 4-points ground-contact design for the forklift?
You are right. The calibration just measures rotating speed of left and right wheels and try to make the speed become similar to each other.
If the robot is slipping on the ground, then the robot cannot go straight even if the wheels are rotating with similar speed.
Thank you for the additional information. This would mean that this “go-straight” calibration would not work for a walking robot like the Beetle bots. Good to know!