Reflections on Optimizing Robotic Balance Through Hardware Design (Part 5)
Let’s explore what kind of torso mobility design brings robots closer to human motion using the act of running as our reference.
When a person runs, the waist rotates side to side. On one side, the muscles contract, while on the other side, they relax. At that moment, the contracting side and the spine can be considered a temporary composite structure, forming a dynamic balance that influences the motion and stability of other body parts. The balance point between the two legs during running doesn’t stay precisely in the body’s center but subtly shifts from side to side (not even considering the forward-backward movement of the center of gravity). This subtle lateral shift is a key factor enabling humans to maintain dynamic balance while walking or running.
But how do these shifts prevent falling? The answer lies in observing the contracting muscles and the spine as a temporary composite structure, dynamically adapting with every motion.
Diagram Explanation
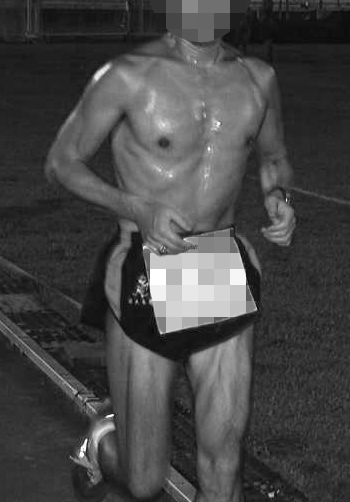
- Figure 1: A running human.
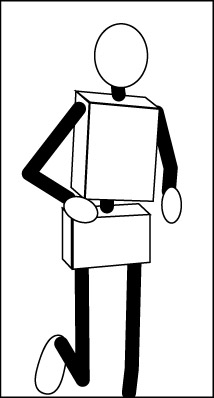
- Figure 2: An existing approach where the body’s movable joints are aligned along the central axis.
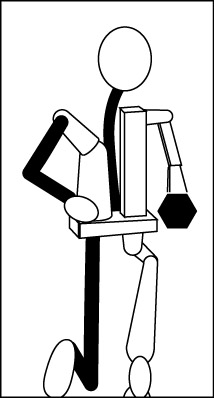
- Figure 3: A proposed design where the “muscles” are divided into left and right groups, and the spine acts as a flexible structure, dynamically integrating with both sides during running to maintain balance.
In Figure 3, I’ve illustrated what I consider a more optimal design—placing the motors on the sides of the spine. I’ve deliberately visualized the left and right “muscles” based on their respective force application principles (somewhat resembling martial arts “internal energy flow”). As a result, the left and right structures look asymmetrical. However, this is merely an example to highlight that during running, the forces exerted by the body and limbs differ significantly in quality.
In a real running robot, the force application may not exactly match the patterns shown here.
Analysis of Motion Dynamics
- Left Arm (The Heavy Counterweight):
The left arm is illustrated as tense and heavy, similar to a wrecking ball swinging backward during a demolition. It doesn’t just follow a pendulum-like backward trajectory—it also twists the left torso structure (depicted as a rectangular column). Observing this motion, one might assume the robot would tip backward or lose balance. - Right Leg (The Whip-like Motion):
Meanwhile, the right leg (shown in bold black lines) is depicted as effortlessly swinging forward, almost whip-like. In a typical robot, a single leg assembly is long and relatively heavy. Without proper dynamic balance, such a motion could result in an unstable split or a catastrophic fall.
This is where the backward swing of the “wrecking ball-like” left arm counterbalances the forward inertia of the right leg. Without this coordination, robots—like those from Tesla or Boston Dynamics—often exhibit constrained movements, taking small, hesitant steps (imagine walking two meters in five small steps), or they appear overly rigid, like stiff animated creatures wasting energy.
Left Leg and Right Arm Counterbalance Dynamics
Left Leg (The Flexible Support):
The left leg acts like the flexible neck of an adjustable desk lamp. It supports the body during the crucial moment of weight transfer and must precisely align with the center of gravity. Without this alignment, the robot risks spinning out of control, like a failed helicopter takeoff.
Right Arm (The Gentle Counterbalance):
The right arm has just completed a forward-reaching motion, with the weight of the right body mass following an arcing trajectory (resembling the swing of a hook punch). This counteracts the backward inertia caused by the left arm’s heavy swing.
In the next moment, the dynamics of the left and right structures reverse roles, and the cycle repeats seamlessly.